저자: Yitang Li, Zhengyi Luo, Tonghe Zhang, Cunxi Dai, Anssi Kanervisto, Andrea Tirinzoni, Haoyang Weng, Kris Kitani, Mateusz Guzek, Ahmed Touati, Alessandro Lazaric, Matteo Pirotta, Guanya Shi | 날짜: 2025-11-06 | DOI: 10.48550/arXiv.2511.04131 📄 PDF
Essence
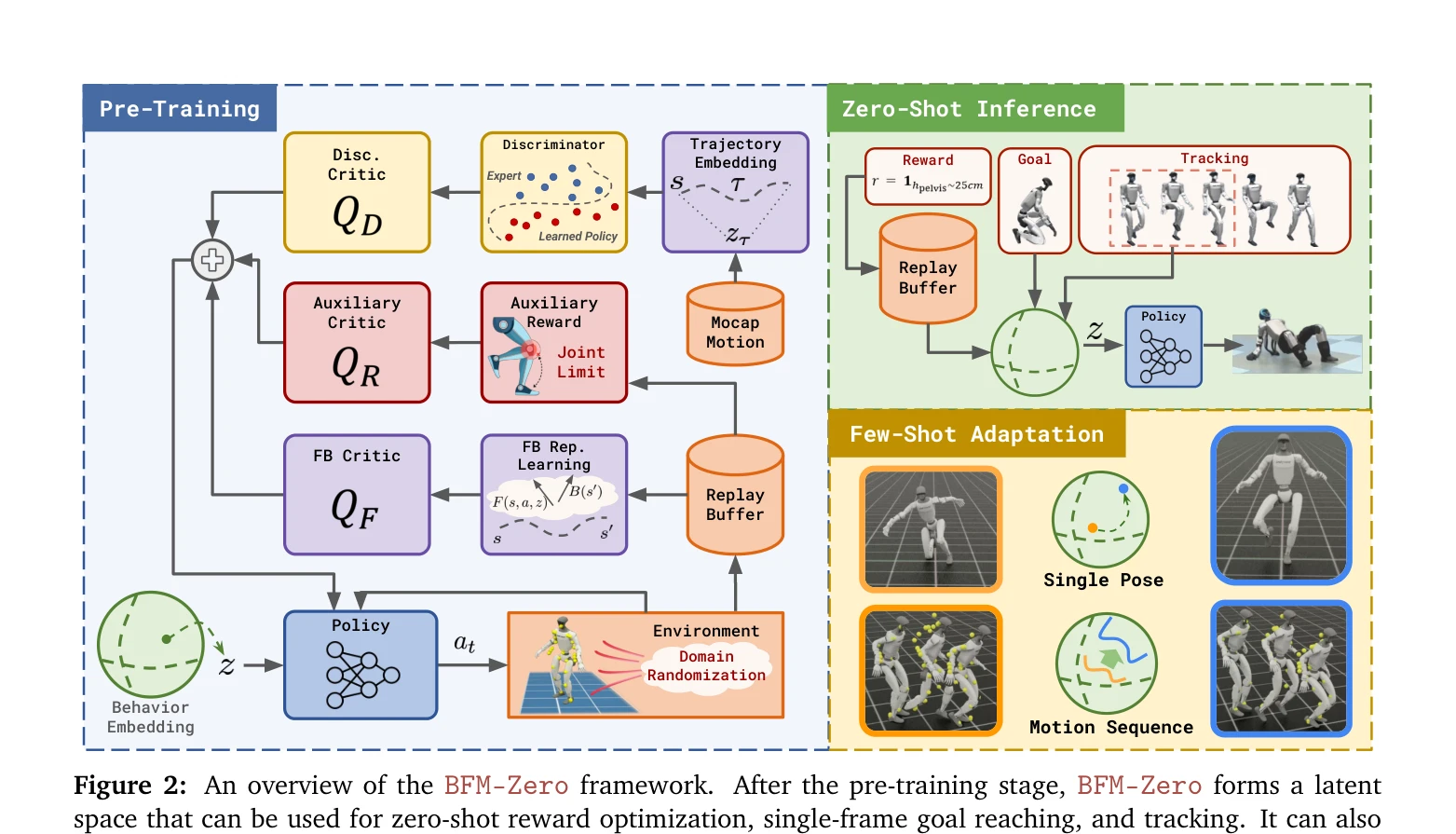
Figure 2: An overview of the BFM-Zero framework. After the pre-training stage, BFM-Zero forms a latent
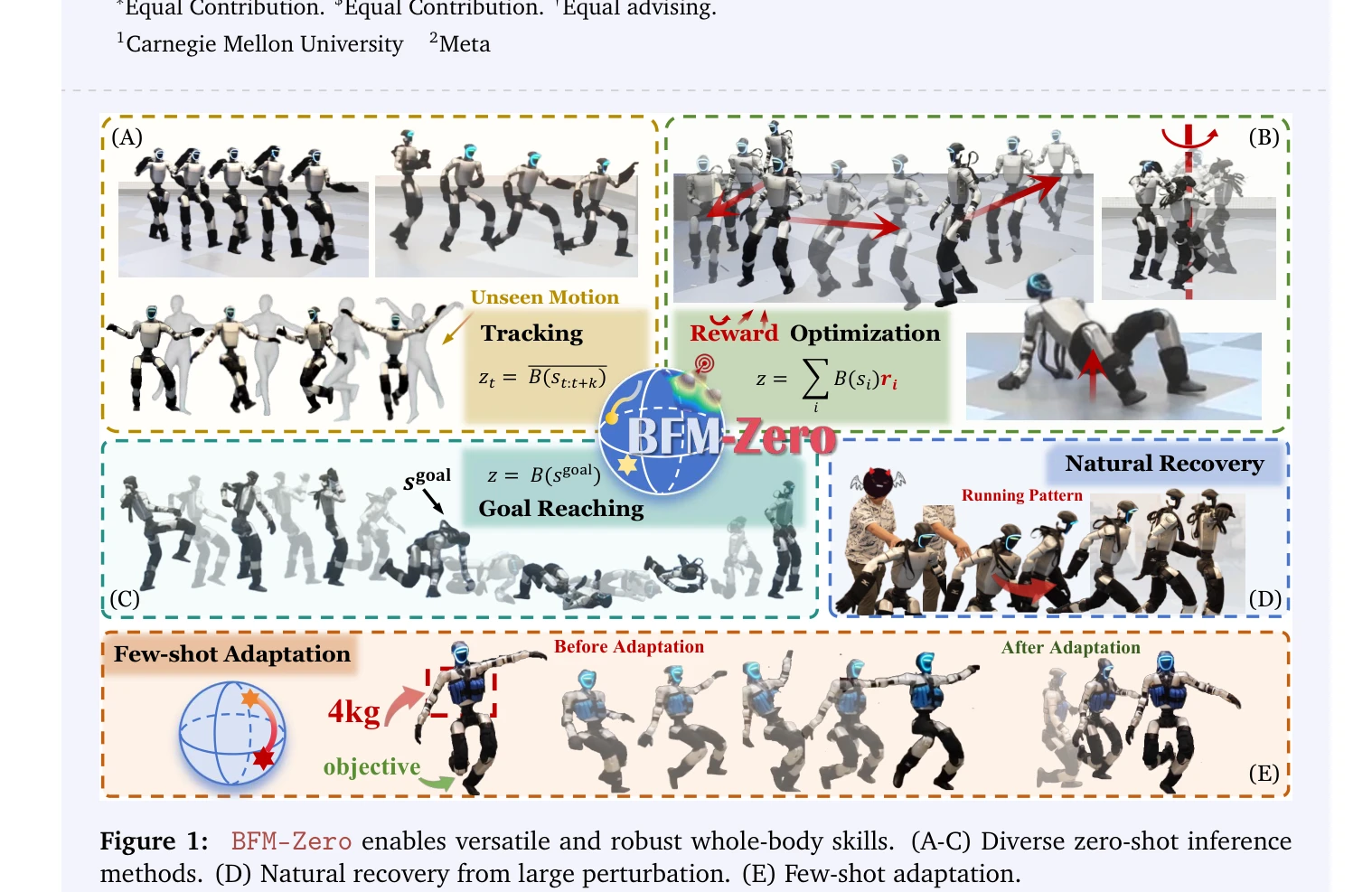
BFM-Zero는 unsupervised RL과 Forward-Backward 모델을 활용하여 휴머노이드 로봇의 다양한 제어 작업을 단일 정책으로 수행할 수 있는 promptable behavioral foundation model을 제시한다. 공유 잠재 공간에 모션, 목표, 보상을 임베딩하여 zero-shot 추론과 few-shot 적응을 가능하게 한다.
Evaluation
Novelty: 4/5 Technical Soundness: 3/5 Significance: 4/5 Clarity: 4/5 Overall: 4/5
총평: BFM-Zero는 unsupervised RL을 통해 휴머노이드 로봇의 실제 배포에서 처음으로 promptable foundation model을 성공적으로 구현하였으며, zero-shot 다중 작업 수행과 few-shot 적응의 균형을 이루는 실용적 솔루션을 제시한다. 이는 로봇 제어의 패러다임 전환을 제시하는 중요한 기여이다.