Essence
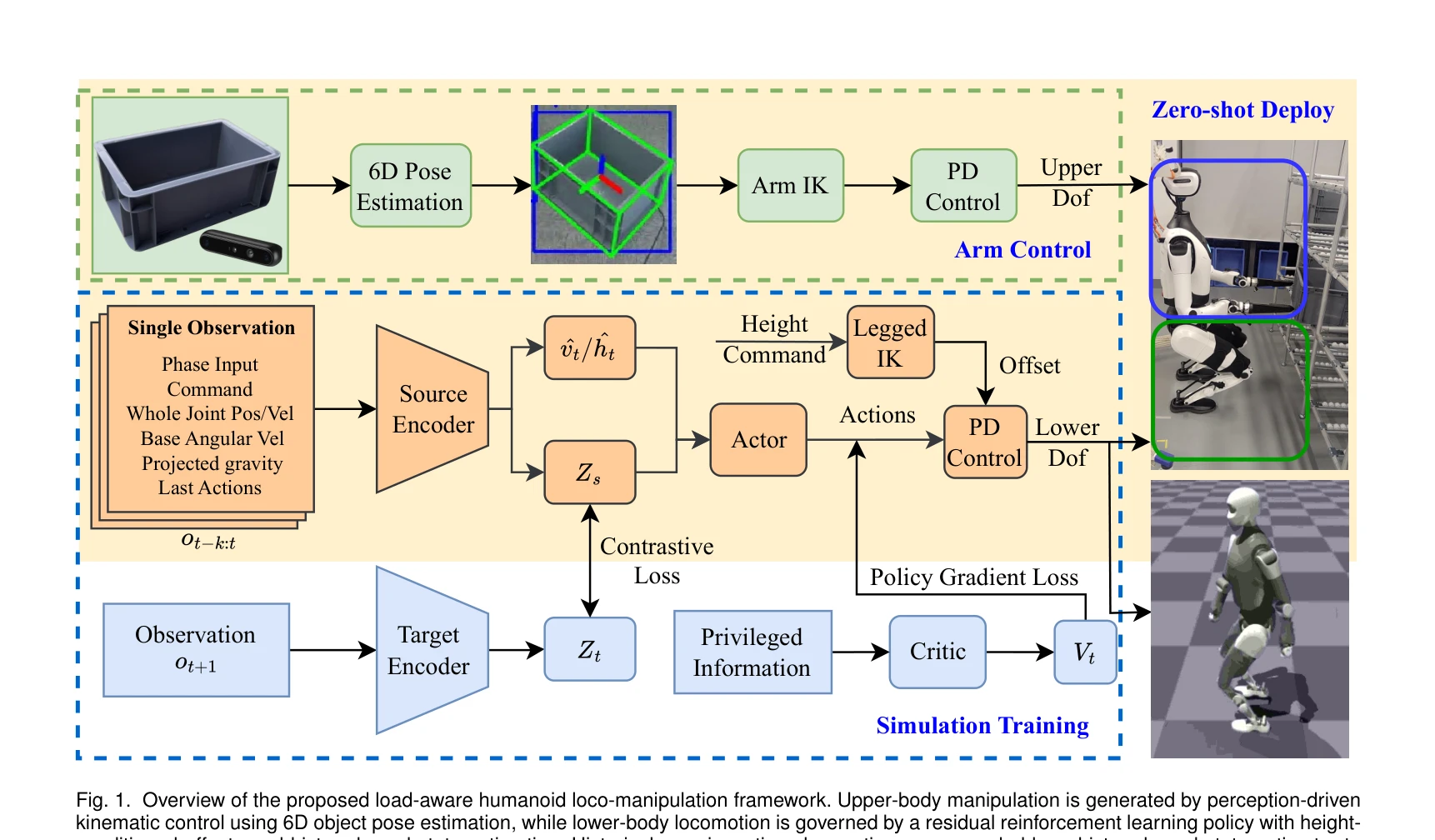
Fig. 1. Overview of the proposed load-aware humanoid loco-manipulation framework. Upper-body manipulation is generated b
산업용 휴머노이드 로봇의 다양한 하중 조건에서 안정적 보행을 위해 분리-협조 구조의 로코-매니퓰레이션 아키텍처를 제안하며, RL 기반 하체 제어와 상태 추정기를 통해 시뮬레이션 학습 후 실제 로봇에 파인튜닝 없이 배포 성공.