Essence
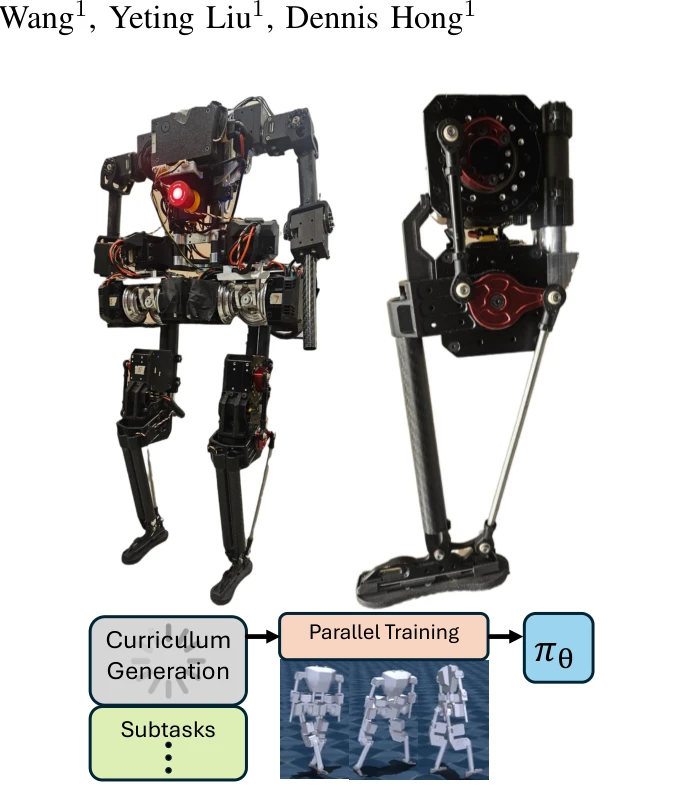
Fig. 1: BRUCE [2] hardware with three distinct parallel mechanisms, which
본 논문은 병렬 구동 메커니즘을 완전히 시뮬레이션하여 학습한 RL 정책을 휴머노이드 로봇 BRUCE에 배포하며, 기존의 직렬 근사 방식과 달리 폐곡선 운동학 제약을 GPU 가속 MJX로 네이티브 구현한다.
저자: Yusuke Tanaka, Alvin Zhu, Quanyou Wang, Yeting Liu, Dennis Hong | 날짜: 2025-06-30 | URL: https://arxiv.org/abs/2507.00273 📄 PDF
Fig. 1: BRUCE [2] hardware with three distinct parallel mechanisms, which
본 논문은 병렬 구동 메커니즘을 완전히 시뮬레이션하여 학습한 RL 정책을 휴머노이드 로봇 BRUCE에 배포하며, 기존의 직렬 근사 방식과 달리 폐곡선 운동학 제약을 GPU 가속 MJX로 네이티브 구현한다.
Fig. 1: BRUCE [2] hardware with three distinct parallel mechanisms, which
총평: 본 논문은 병렬 메커니즘의 기계적 특성을 완전히 시뮬레이션하여 RL 학습에 반영하는 혁신적 접근법을 제시하며, 실제 하드웨어 검증을 통해 이 방식의 실질적 성능 이득을 명확히 보여줌으로써 휴머노이드 로봇 제어 분야에 중요한 기여를 한다.