Essence
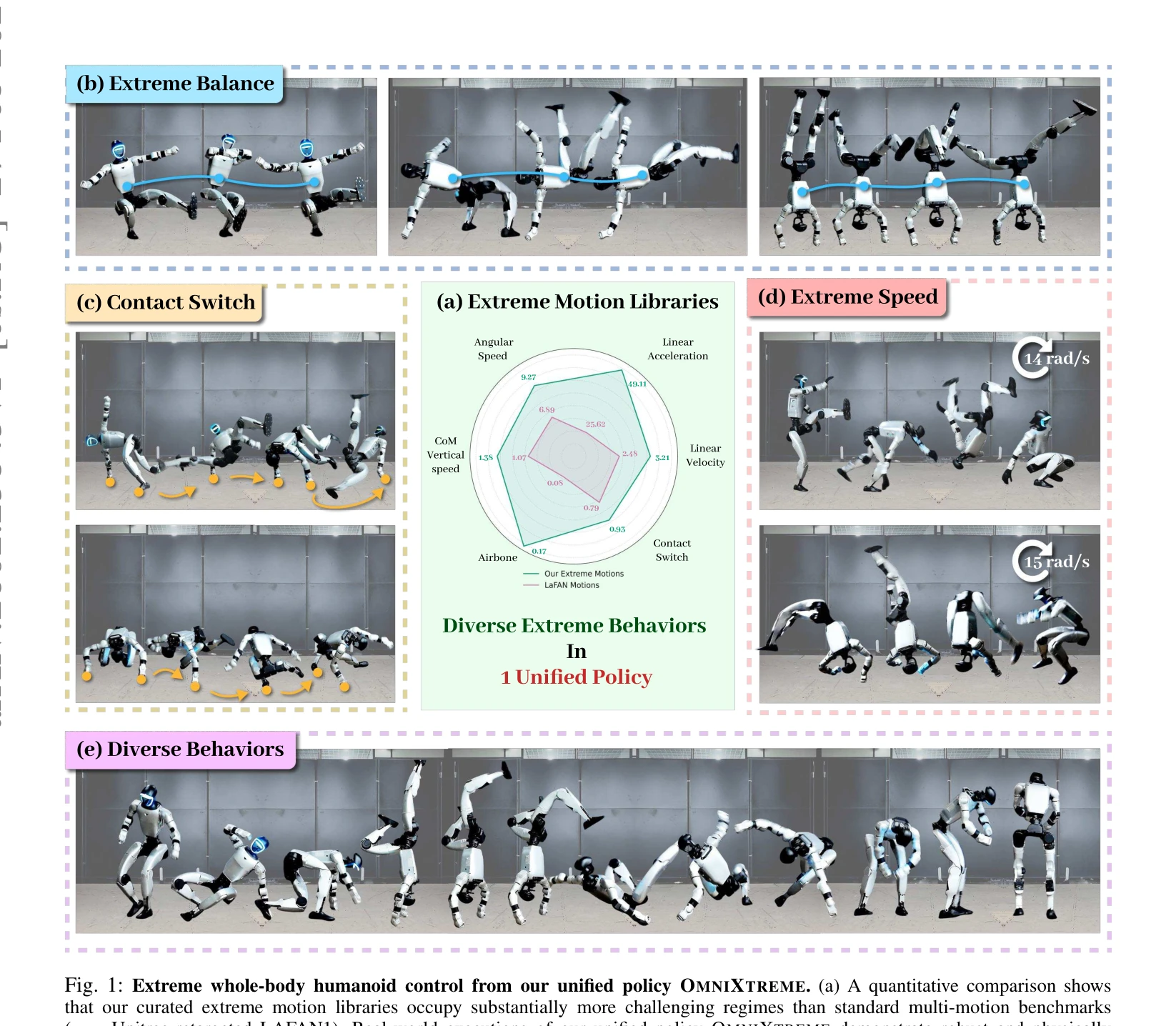
Fig. 1: Extreme whole-body humanoid control from our unified policy OMNIXTREME. (a) A quantitative comparison shows
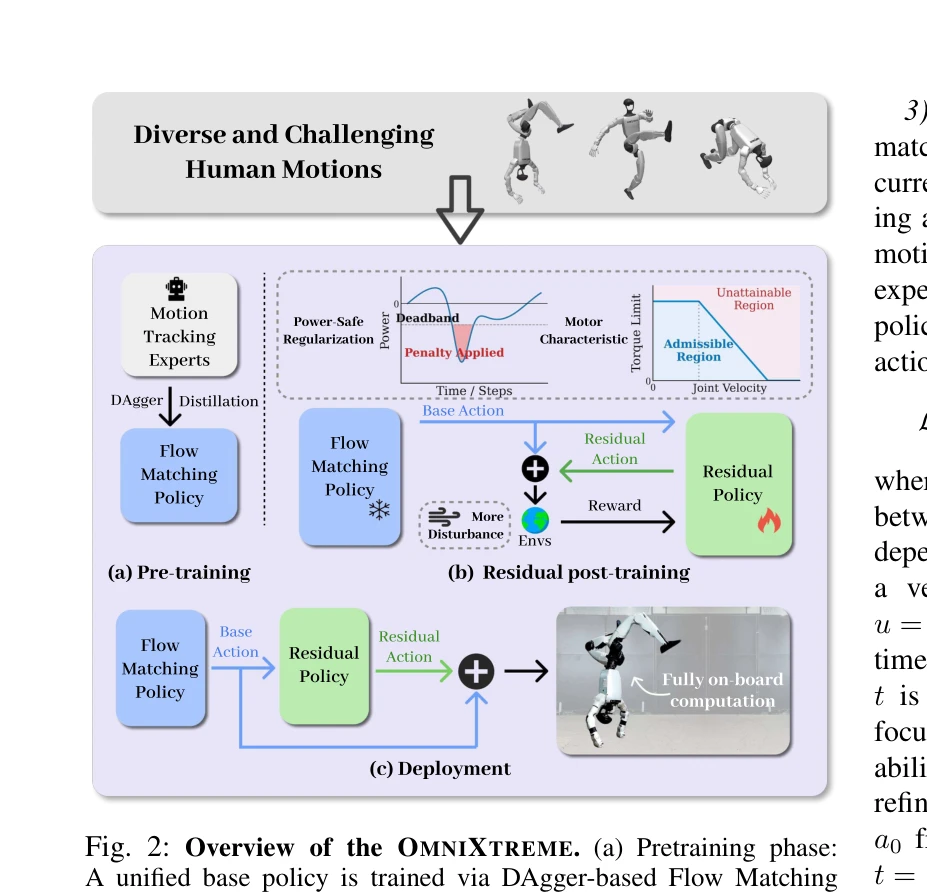
OmniXtreme는 flow-matching 기반의 생성형 정책과 actuation-aware residual RL을 결합하여 고동역 인간형 로봇의 다양한 극단적 동작을 고충실도로 추적할 수 있는 확장 가능한 프레임워크를 제시한다.