Essence
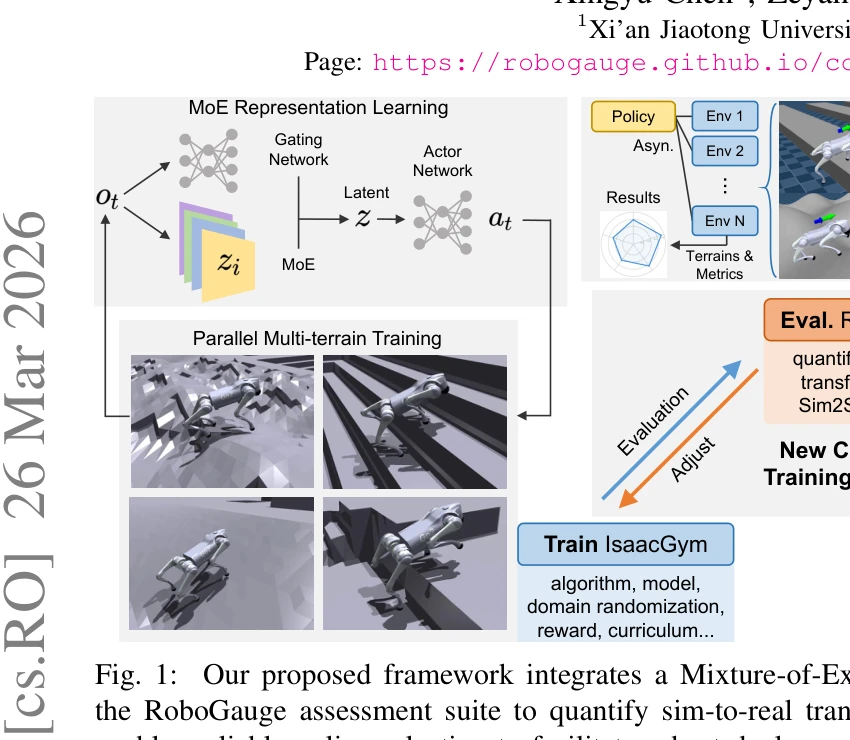
Fig. 1:
본 논문은 Mixture-of-Experts (MoE) 기반 사족 로봇 이동 정책과 sim-to-real 전이 가능성을 정량화하는 RoboGauge 평가 프레임워크를 통합하여 신뢰할 수 있는 시뮬레이션-실제 간 갭을 해소하는 통합 프레임워크를 제시한다.
저자: Tianyang Wu, Hanwei Guo, Yuhang Wang, Junshu Yang, Xinyang Sui, Jiayi Xie, Xingyu Chen, Zeyang Liu, Xuguang Lan | 날짜: 2026-01-31 | URL: https://arxiv.org/abs/2602.00678 📄 PDF
Fig. 1:
본 논문은 Mixture-of-Experts (MoE) 기반 사족 로봇 이동 정책과 sim-to-real 전이 가능성을 정량화하는 RoboGauge 평가 프레임워크를 통합하여 신뢰할 수 있는 시뮬레이션-실제 간 갭을 해소하는 통합 프레임워크를 제시한다.
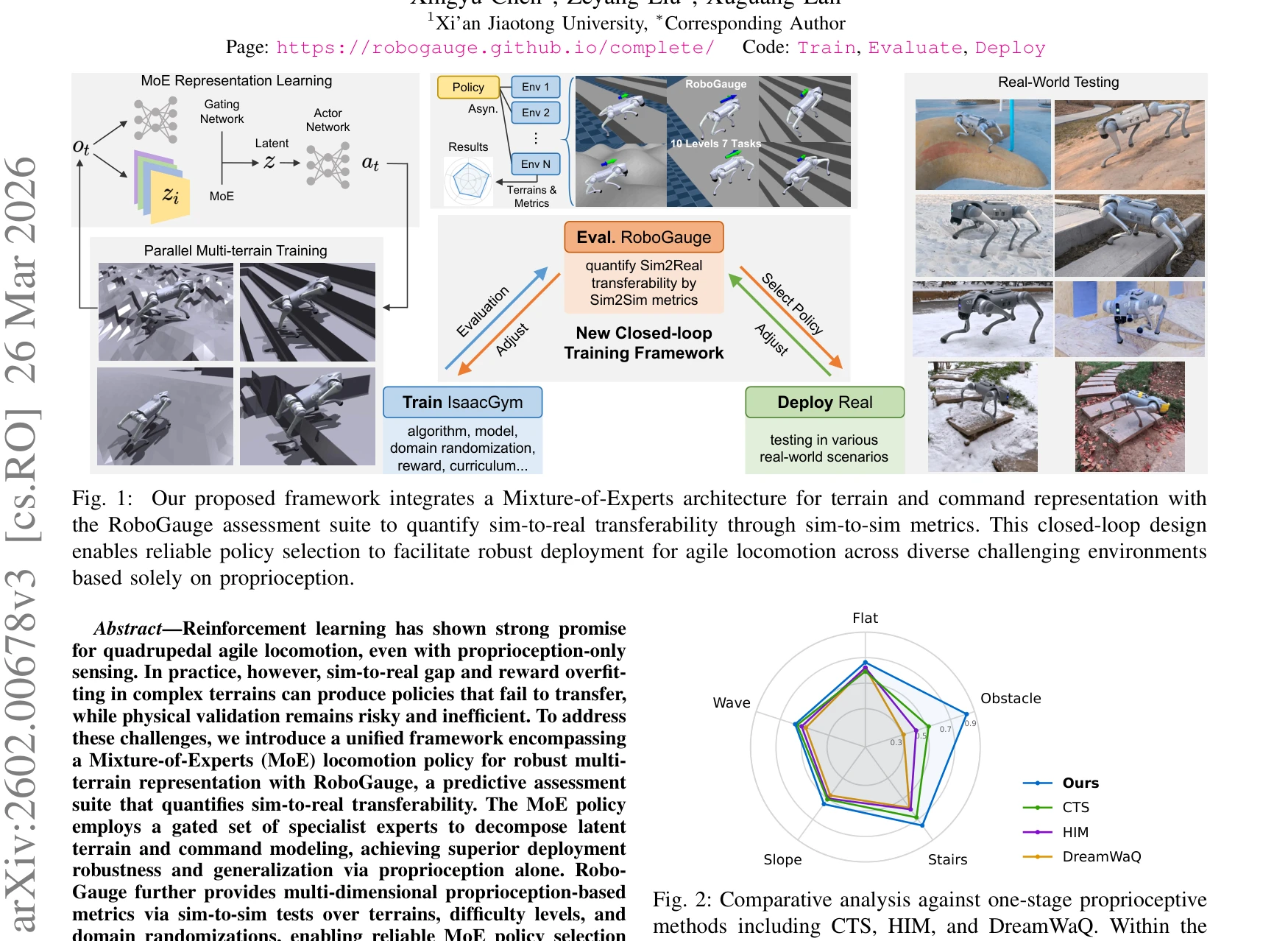
Fig. 2: Comparative analysis against one-stage proprioceptive
Fig. 1:
총평: 본 논문은 MoE 기반 정책과 RoboGauge 평가 프레임워크를 통합하여 sim-to-real 갭 문제를 체계적으로 해결하고, 극한 지형에서 4 m/s의 견고한 이동 성능을 입증함으로써 사족 로봇 이동 제어 분야에 유의미한 기여를 한다.