Essence
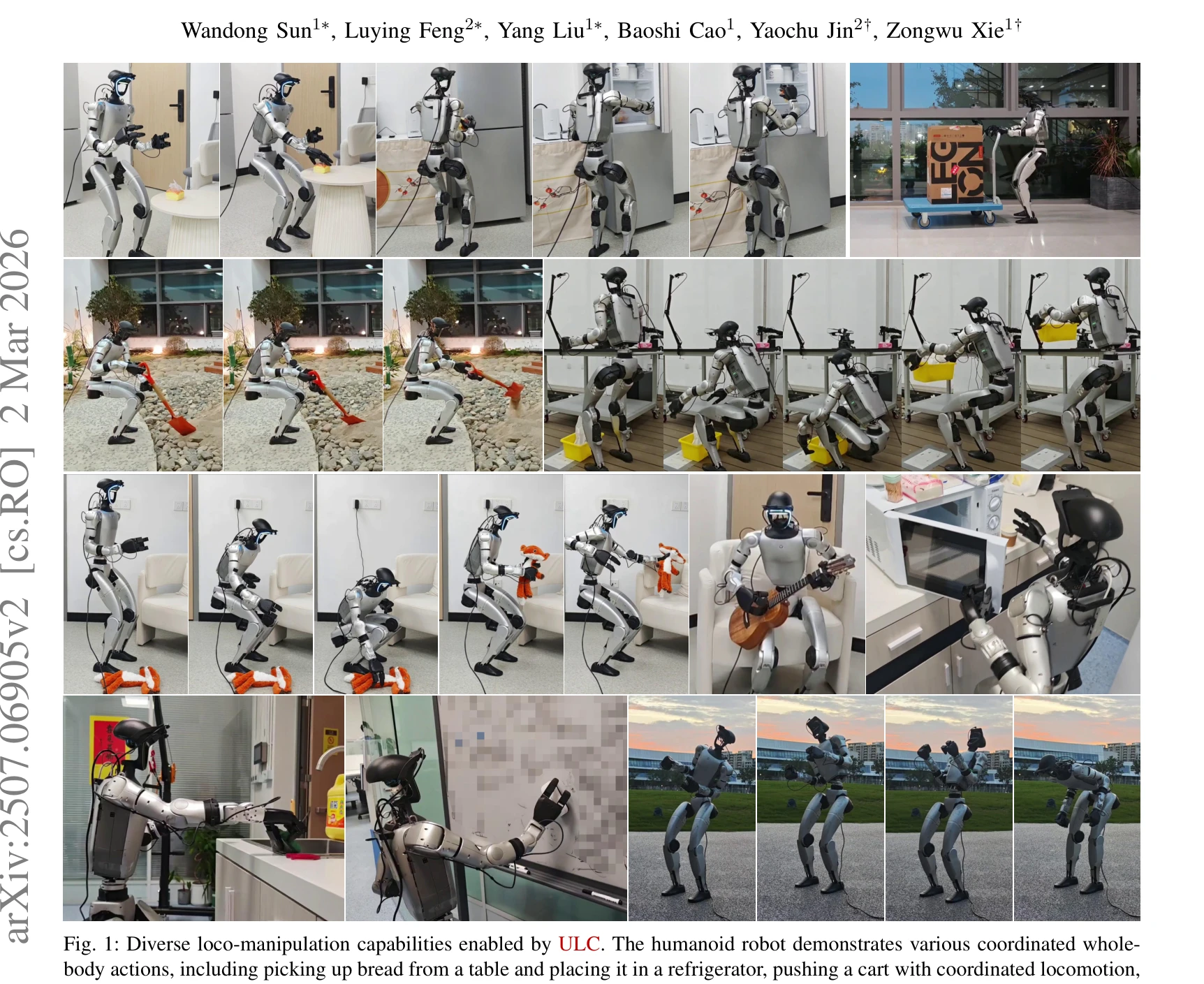
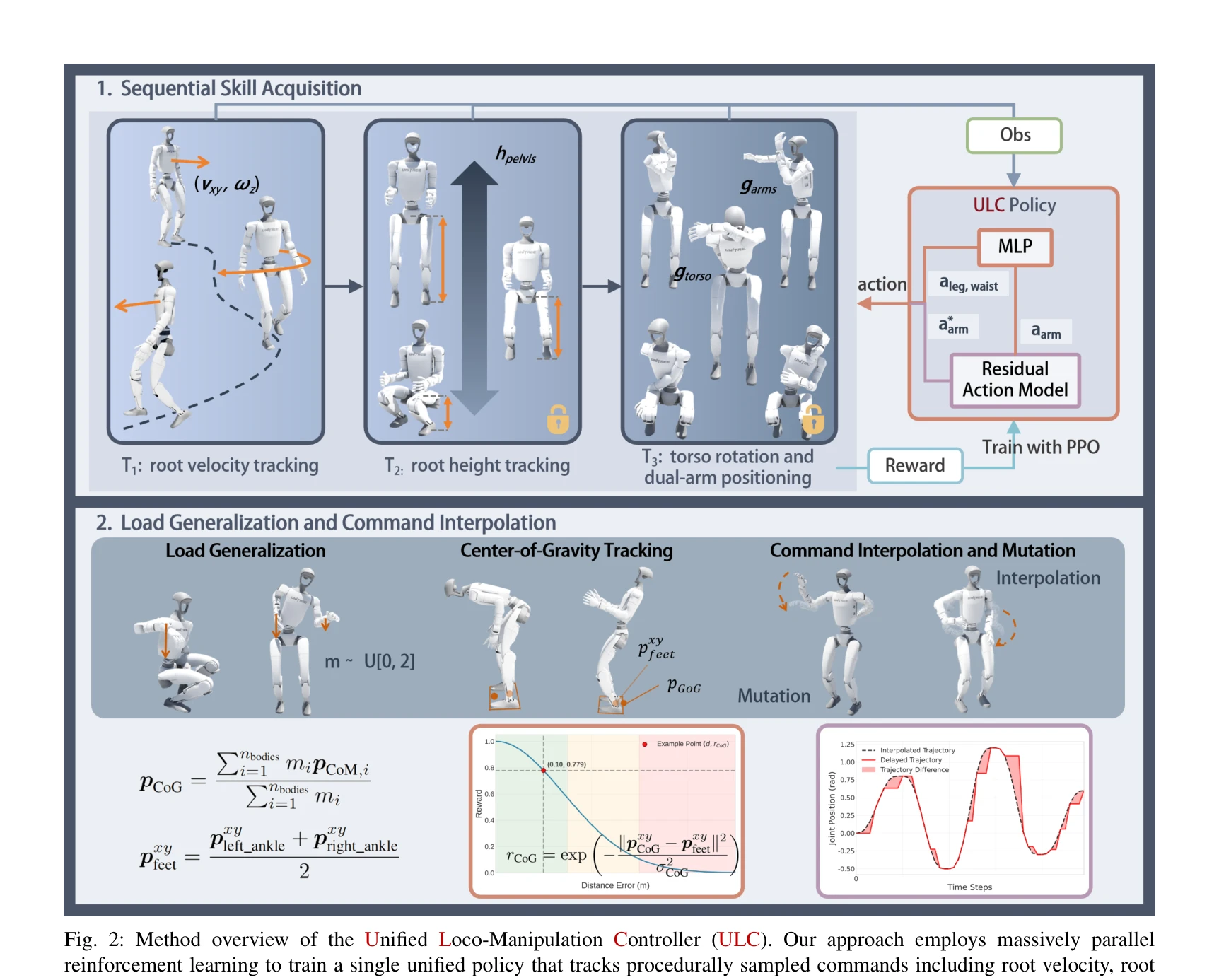
Fig. 1: Diverse loco-manipulation capabilities enabled by ULC. The humanoid robot demonstrates various coordinated whole
ULC는 인간형 로봇의 보행-조작을 위해 상체와 하체 제어를 통합한 단일 정책 프레임워크로, sequential skill acquisition, residual action modeling, 다항식 보간 등의 기술을 통해 추적 정확도, 넓은 작업 공간, 견고성을 동시에 달성한다.
Evaluation
Novelty: 4/5 Technical Soundness: 3/5 Significance: 4/5 Clarity: 4/5 Overall: 4/5
총평: ULC는 humanoid loco-manipulation 분야에서 통합 제어의 실행 가능성을 처음으로 대규모 실험으로 입증한 의미 있는 논문이며, sequential skill acquisition, residual action modeling, deployment-realistic training 등의 체계적인 기술 조합으로 높은 추적 성능과 넓은 작업 공간을 동시에 달성했다. 다만 단일 하드웨어 플랫폼에만 검증되었고 시뮬레이션 기반 훈련의 현실 일반화 가능성에 대한 상세 분석이 부족한 점이 한계이다.