Essence
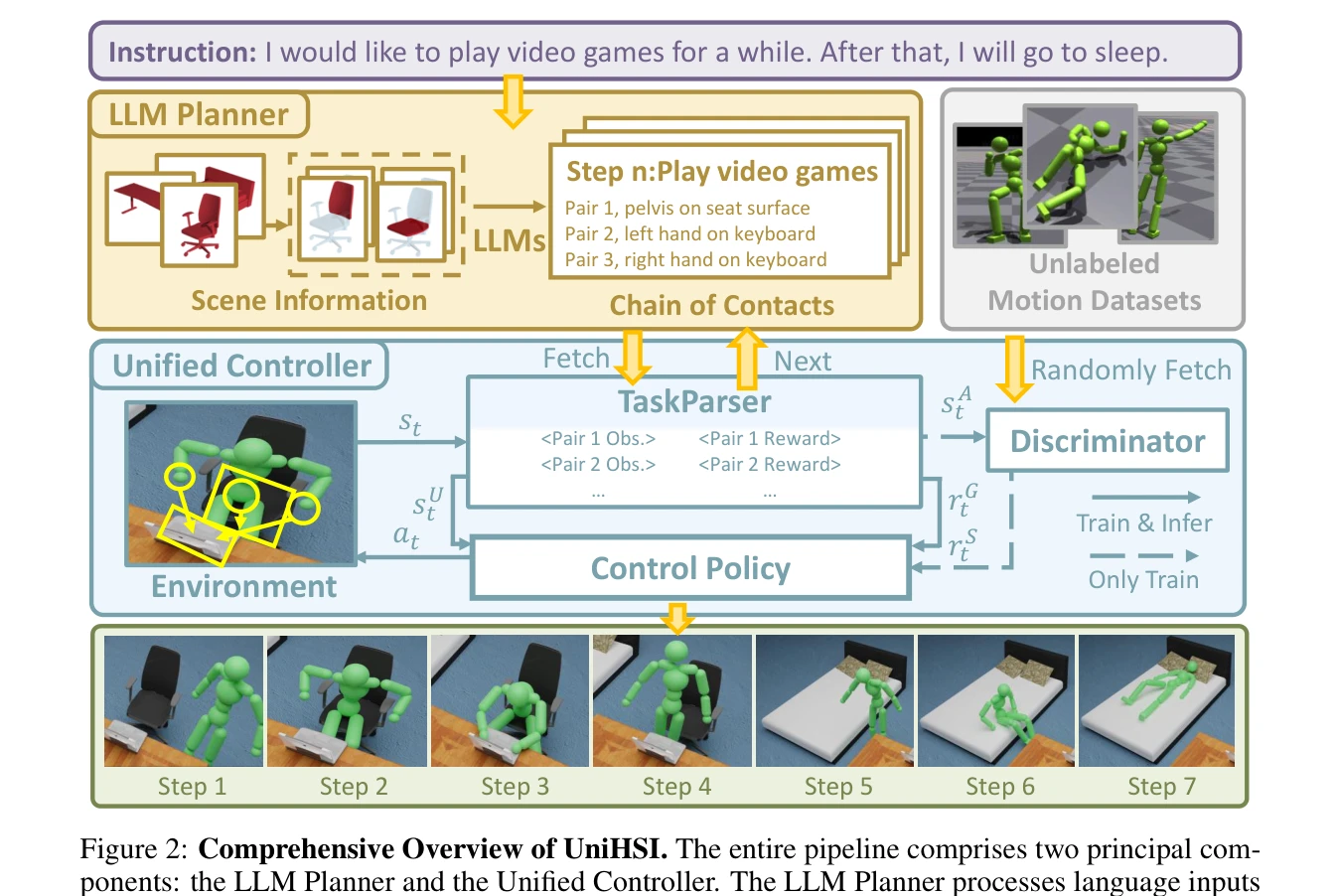
Figure 2: Comprehensive Overview of UniHSI. The entire pipeline comprises two principal com-
UniHSI는 Large Language Model을 활용하여 자연어 명령을 Chain of Contacts (CoC)로 변환하고, 통합 컨트롤러를 통해 다양한 인간-장면 상호작용을 물리적으로 타당하게 수행하는 프레임워크를 제안한다.
저자: Zeqi Xiao, Tai Wang, Jingbo Wang, Jinkun Cao, Wenwei Zhang, Bo Dai, Dahua Lin, Jiangmiao Pang | 날짜: 2023-09-14 | URL: https://arxiv.org/abs/2309.07918 📄 PDF
Figure 2: Comprehensive Overview of UniHSI. The entire pipeline comprises two principal com-
UniHSI는 Large Language Model을 활용하여 자연어 명령을 Chain of Contacts (CoC)로 변환하고, 통합 컨트롤러를 통해 다양한 인간-장면 상호작용을 물리적으로 타당하게 수행하는 프레임워크를 제안한다.
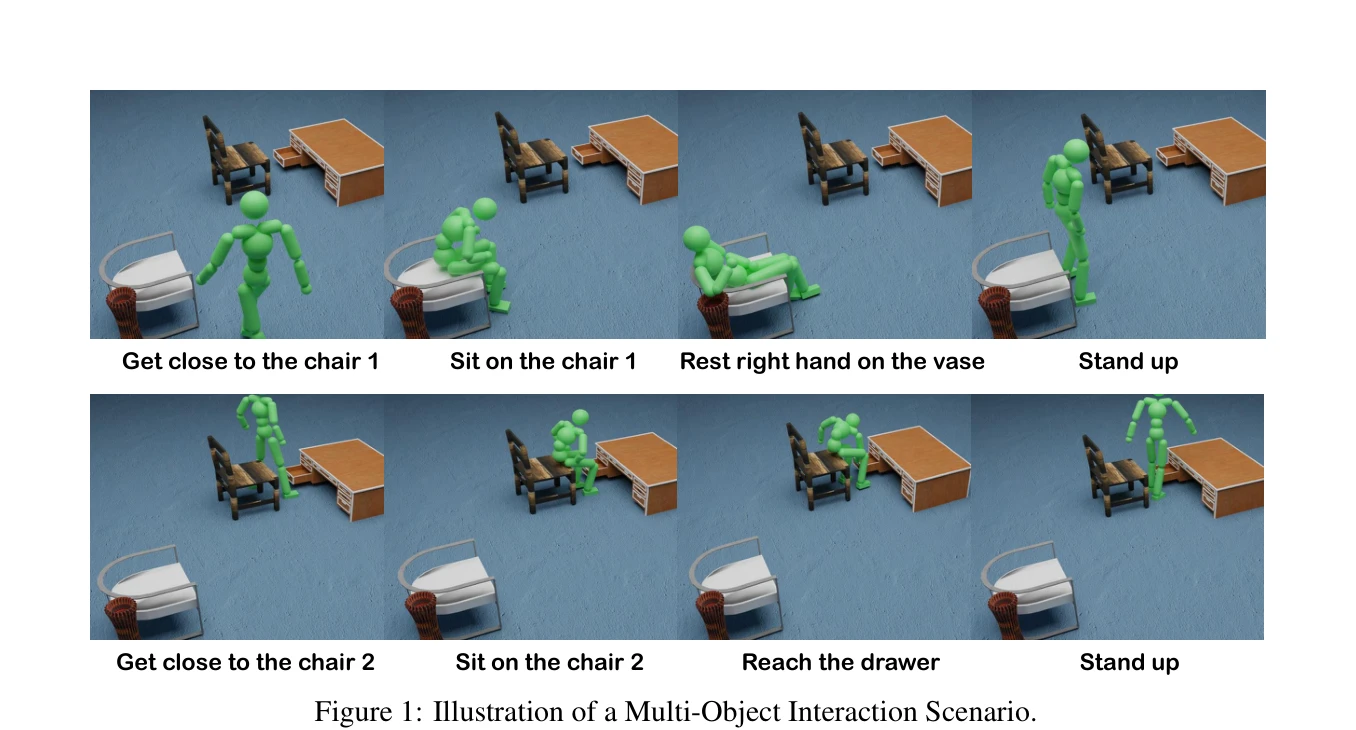
Figure 1: UniHSI facilitates unified and long-horizon control in response to natural language com-
Figure 3: The Procedure for Translating Language Commands into Chains of Contacts.
총평: UniHSI는 Chain of Contacts라는 새로운 상호작용 표현과 LLM 기반 계획 생성으로 자연어 명령 기반의 다양하고 장기간의 인간-장면 상호작용을 통합적으로 제어하는 혁신적 프레임워크이며, ICLR 2024 발표 논문으로서 embodied AI 분야에 의미 있는 기여를 제시한다.