Essence
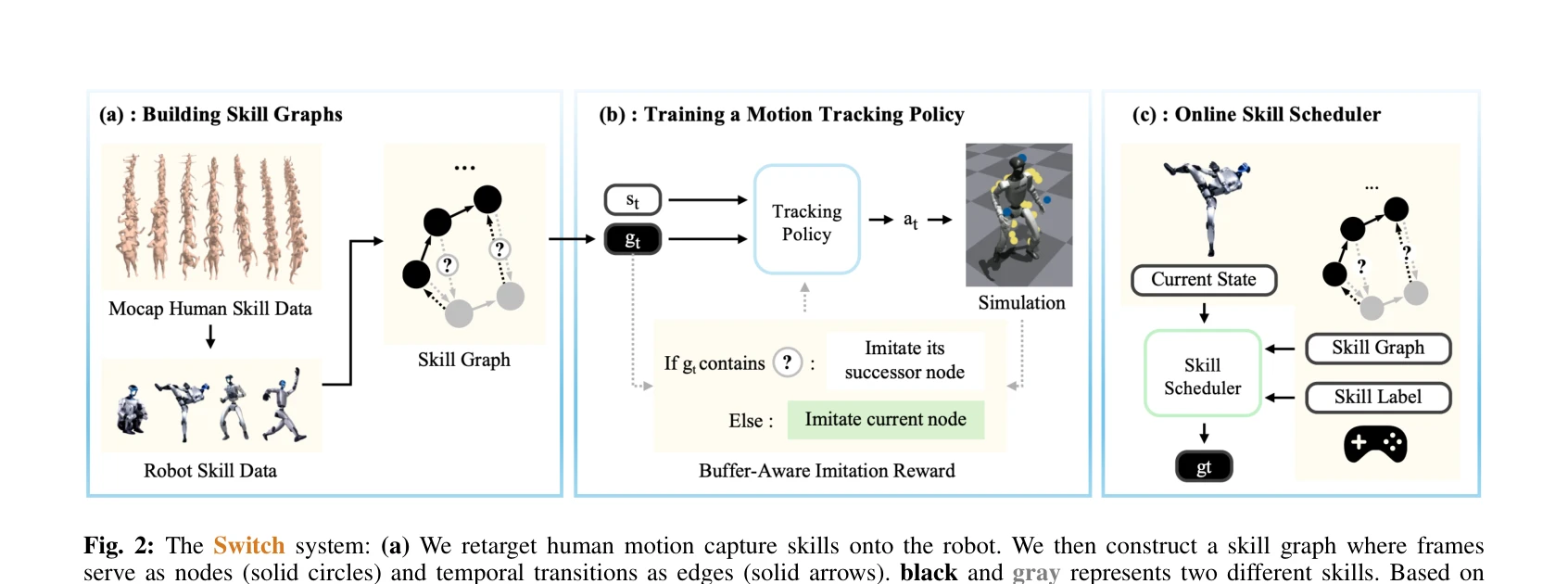
Fig. 2: The Switch system: (a) We retarget human motion capture skills onto the robot. We then construct a skill graph w
Switch는 Skill Graph를 기반으로 humanoid robot이 임의의 시점에서 다양한 동작 기술들 사이를 자유롭게 전환할 수 있는 계층적 전신 제어 시스템을 제시한다.
저자: Yuen-Fui Lau, Qihan Zhao, Yinhuai Wang, Runyi Yu, Hok Wai Tsui, Qifeng Chen, Ping Tan | 날짜: 2026-04-16 | URL: https://arxiv.org/abs/2604.14834 📄 PDF
Fig. 2: The Switch system: (a) We retarget human motion capture skills onto the robot. We then construct a skill graph w
Switch는 Skill Graph를 기반으로 humanoid robot이 임의의 시점에서 다양한 동작 기술들 사이를 자유롭게 전환할 수 있는 계층적 전신 제어 시스템을 제시한다.
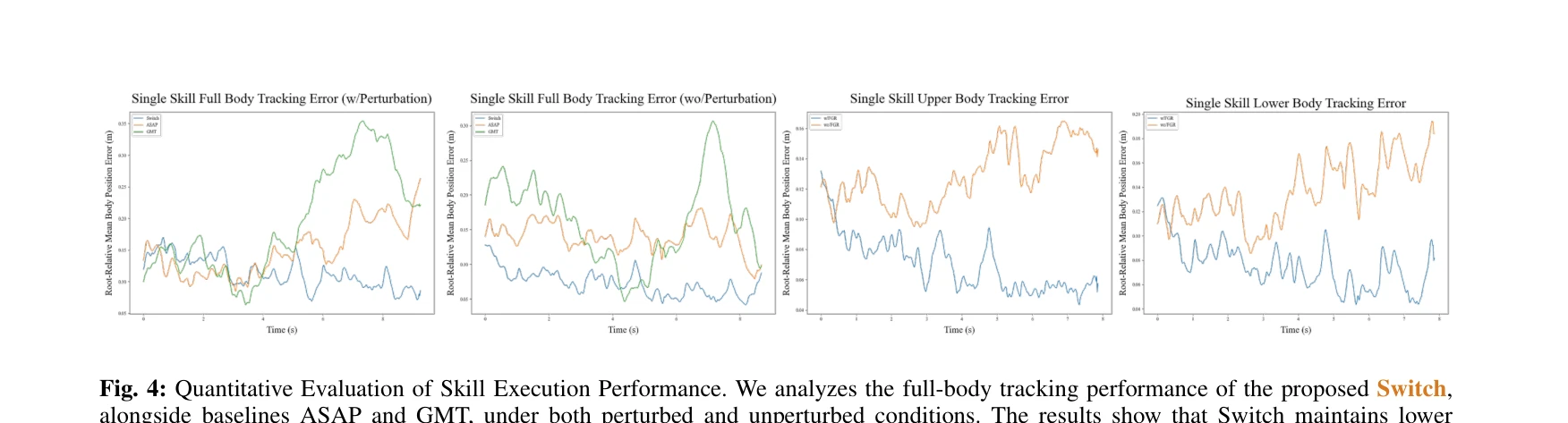
Fig. 4: Quantitative Evaluation of Skill Execution Performance. We analyzes the full-body tracking performance of the pr
Fig. 2: The Switch system: (a) We retarget human motion capture skills onto the robot. We then construct a skill graph w
총평: Switch는 Skill Graph라는 단순하면서도 효과적인 구조와 online graph search 기반의 동적 재계획을 통해 humanoid robot의 skill switching 문제를 실용적으로 해결한 의미 있는 연구이며, 실제 로봇 플랫폼에서의 검증으로 높은 적용 가치를 보여준다.