저자: Weiji Xie, Jinrui Han, Jiakun Zheng, Huanyu Li, Xinzhe Liu, Jiyuan Shi, Weinan Zhang, Chenjia Bai, Xuelong Li | 날짜: 2025-06-15 | URL: https://arxiv.org/abs/2506.12851 📄 PDF
Essence
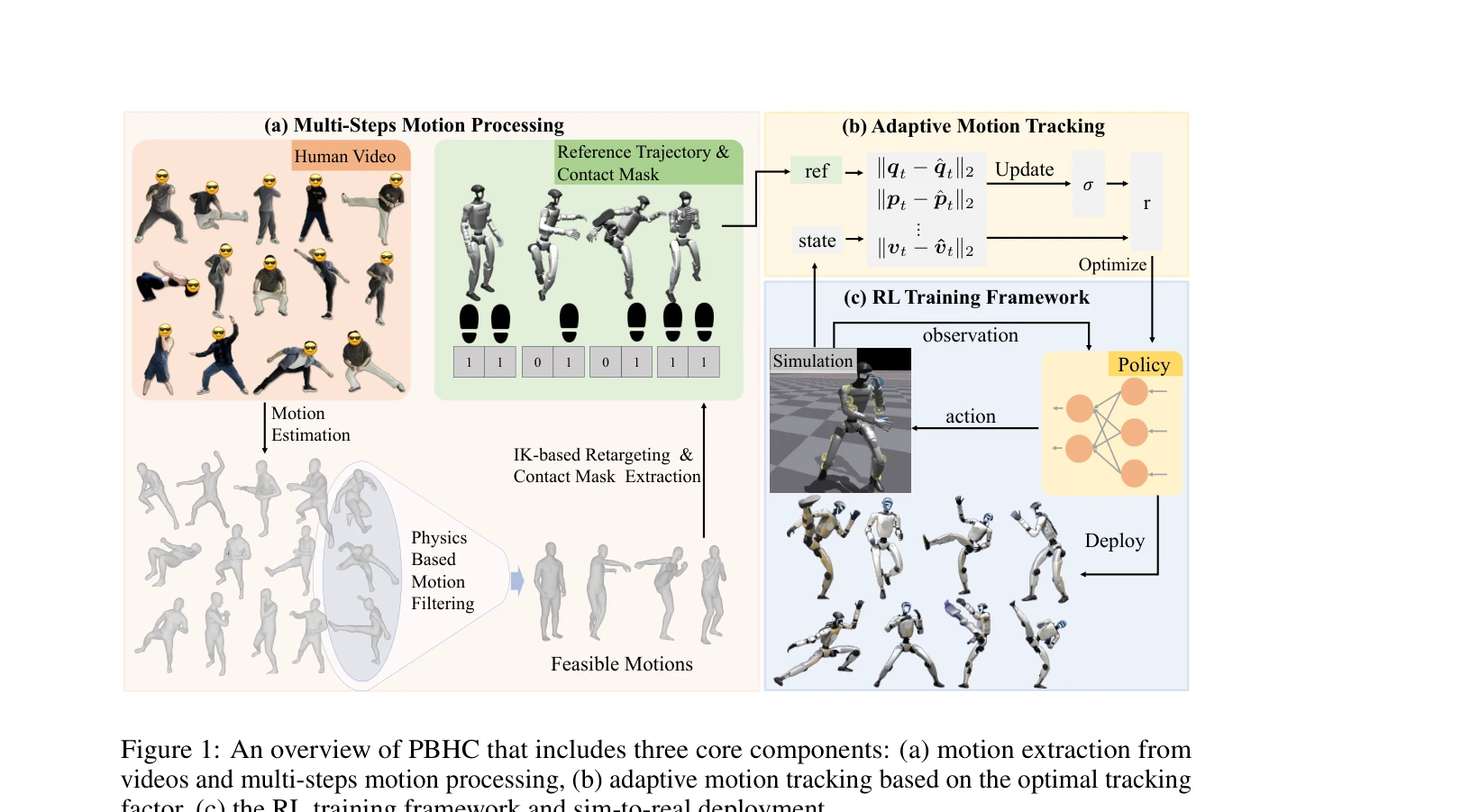
Figure 1: An overview of PBHC that includes three core components: (a) motion extraction from
본 논문은 물리 기반 인간형 로봇 제어 프레임워크(PBHC)를 제안하여 쿵푸, 댄싱 등 고도로 동적인 인간 행동을 모방하도록 학습하는 방법을 제시한다. 다단계 모션 처리와 적응형 모션 추적을 통해 기존 방법보다 현저히 낮은 추적 오차를 달성하고 실제 로봇에 배포된다.
Evaluation
Novelty: 4/5 Technical Soundness: 4/5 Significance: 4/5 Clarity: 4/5 Overall: 4/5
총평: 본 논문은 물리 기반 모션 처리, 적응형 bi-level optimization 커리큘럼, 비대칭 actor-critic 구조를 결합한 포괄적 프레임워크로 고도로 동적인 인간형 로봇 제어 문제를 체계적으로 해결한다. 실제 로봇 배포 성공과 기존 방법 대비 현저한 성능 향상은 강력한 기술적 기여를 입증하며, 인간형 로봇의 동적 행동 학습 분야에서 중요한 진전을 이룬다.