Essence
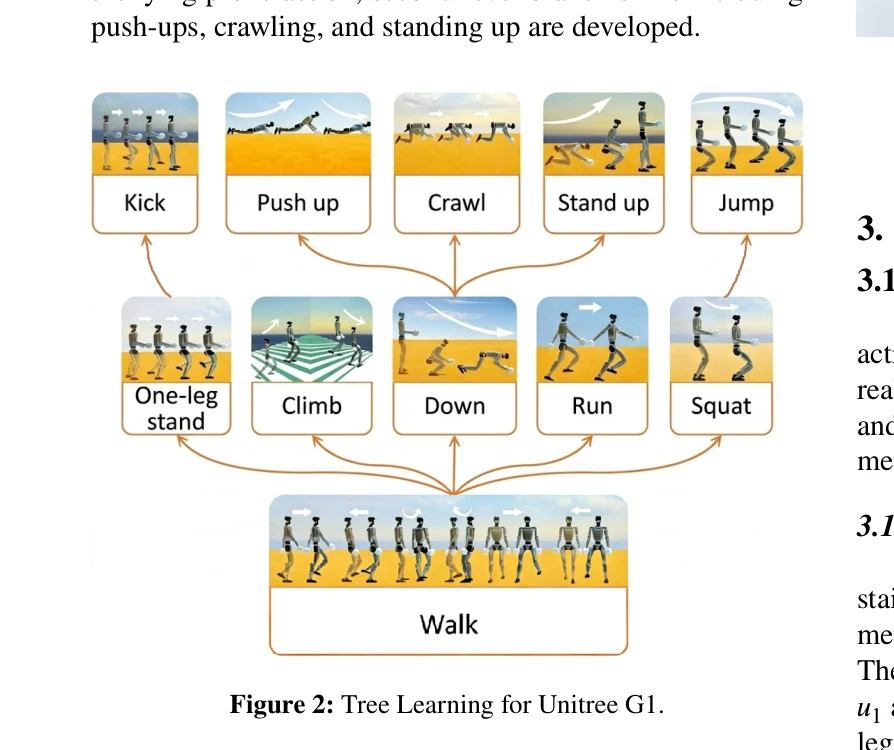
Figure 2: Tree Learning for Unitree G1.
Tree Learning은 humanoid robot을 위한 multi-skill continual learning 프레임워크로, hierarchical parameter inheritance mechanism을 통해 catastrophic forgetting을 방지하면서 새로운 스킬을 효율적으로 확장한다.
저자: Yifei Yan, Linqi Ye | 날짜: 2026-04-14 | URL: https://arxiv.org/abs/2604.12909 📄 PDF
Figure 2: Tree Learning for Unitree G1.
Tree Learning은 humanoid robot을 위한 multi-skill continual learning 프레임워크로, hierarchical parameter inheritance mechanism을 통해 catastrophic forgetting을 방지하면서 새로운 스킬을 효율적으로 확장한다.
Figure 2: Tree Learning for Unitree G1.
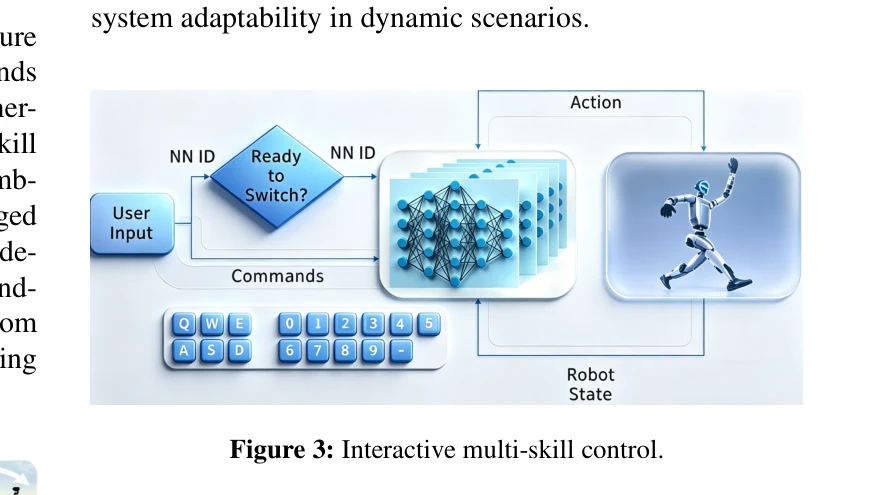
Figure 3: Interactive multi-skill control.
총평: Tree Learning은 biological hierarchy inspired architecture를 통해 humanoid robot의 multi-skill continual learning에서 catastrophic forgetting을 근본적으로 해결하면서 경량 배포를 가능하게 하는 창의적인 솔루션이다. 다만 real-world 환경에서의 실제 검증과 더 복잡한 skill 상호작용에 대한 확장성이 향후 과제이다.