Essence
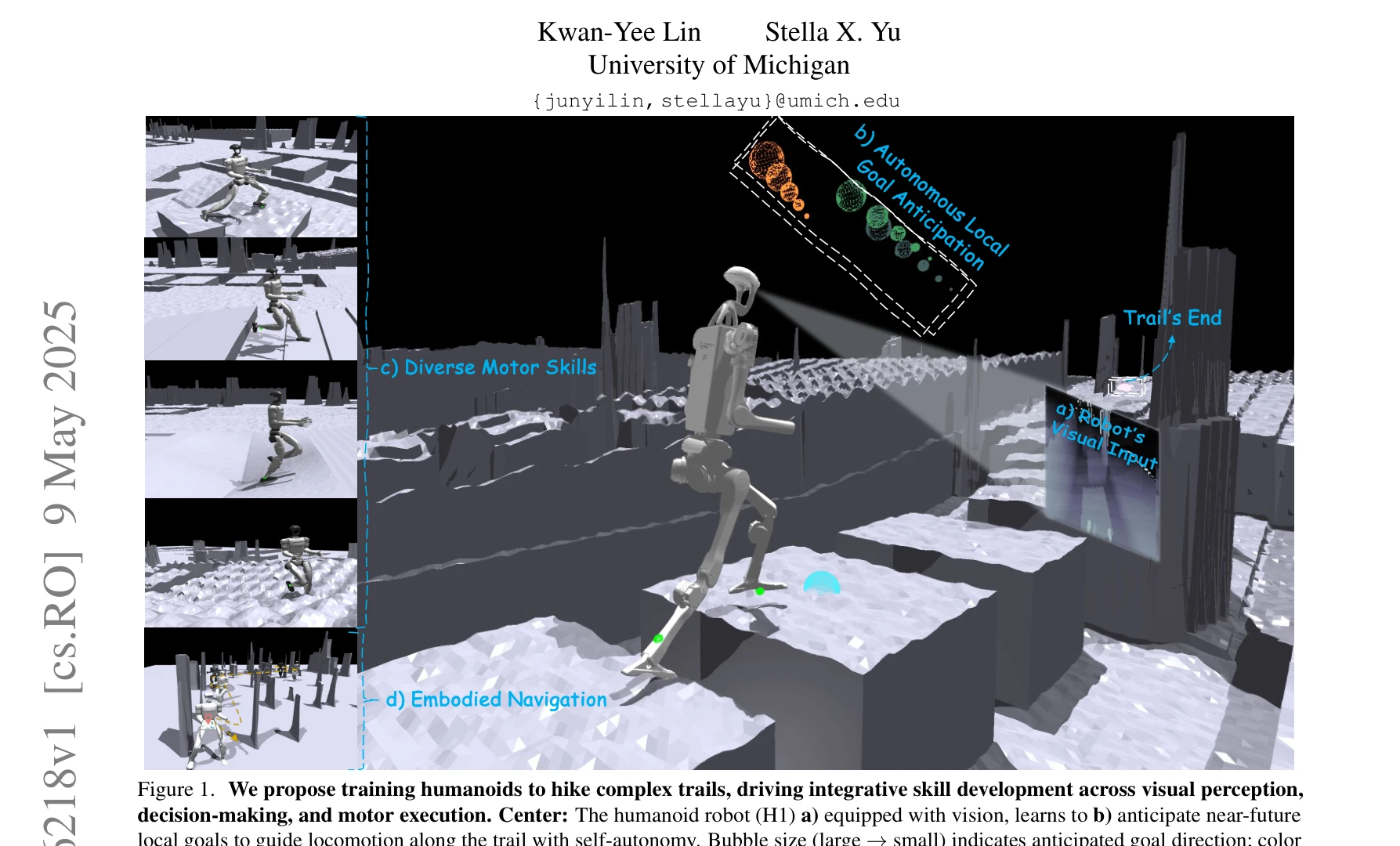
Figure 1. We propose training humanoids to hike complex trails, driving integrative skill development across visual perc
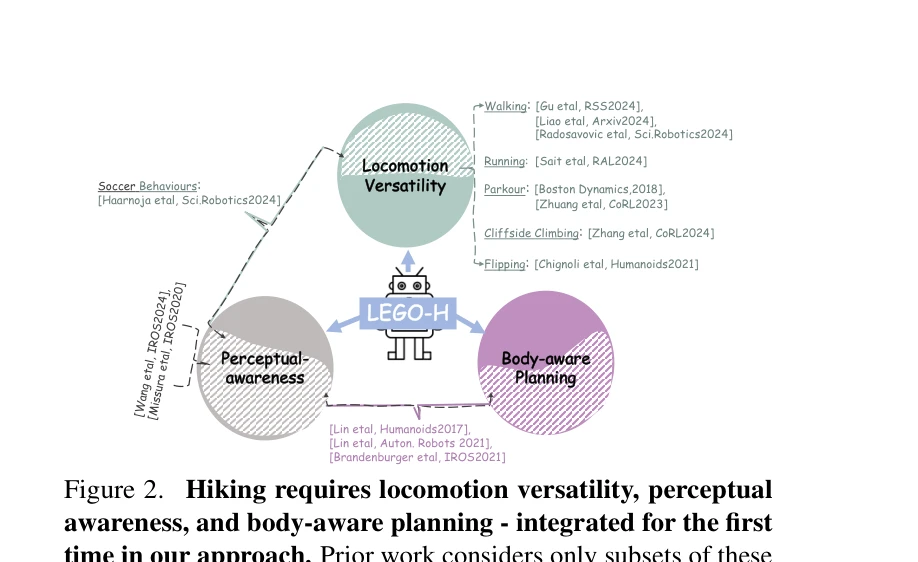
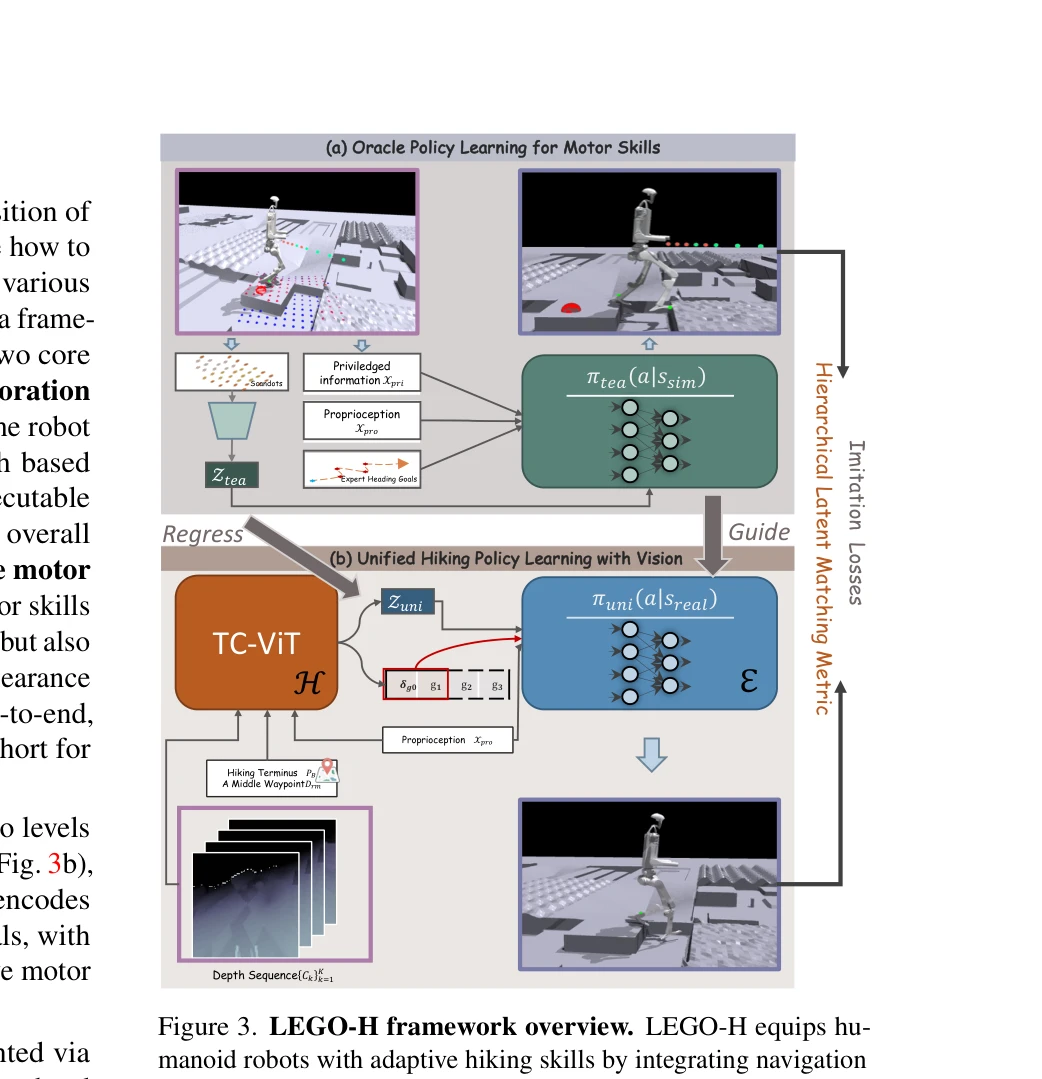
휴머노이드 로봇이 복잡한 산길을 자율적으로 하이킹하도록 학습시키기 위해 시각 인식, 의사결정, 운동 실행을 통합하는 LEGO-H 프레임워크를 제안한다. TC-ViT와 Hierarchical Latent Matching을 통해 네비게이션과 로코모션을 단일 학습 체계로 통합한다.