저자: Josh Merel, Arun Ahuja, Vu Pham, Saran Tunyasuvunakool, Siqi Liu, Dhruva Tirumala, Nicolas Heess, Greg Wayne | 날짜: 2018-11-23 | URL: https://arxiv.org/abs/1811.09656 📄 PDF
Essence
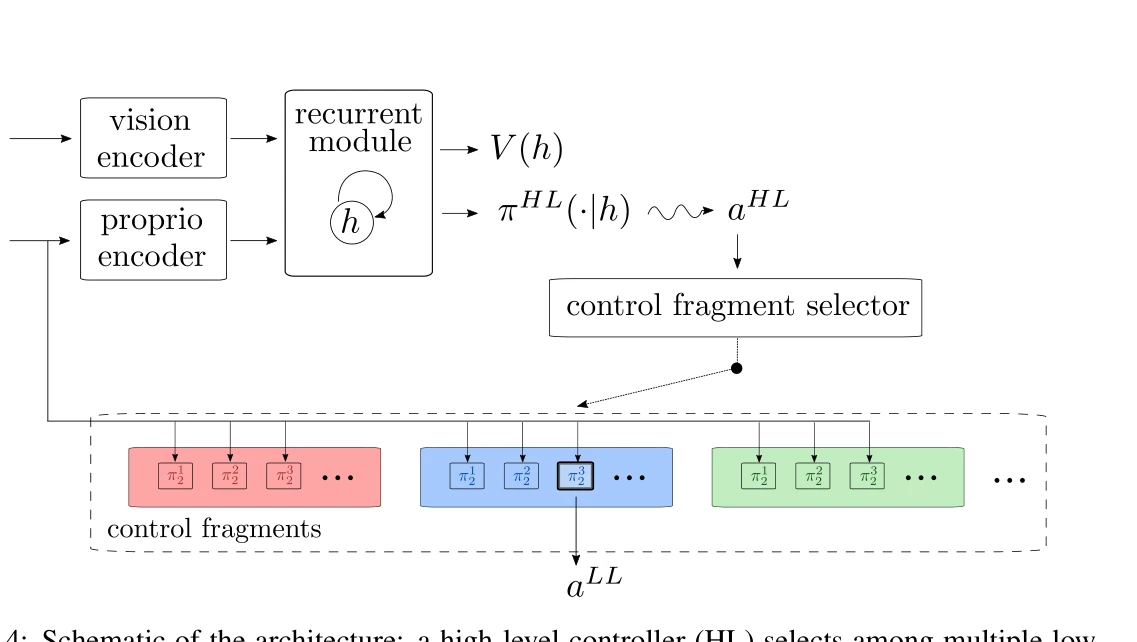
Figure 4: Schematic of the architecture: a high-level controller (HL) selects among multiple low-
인간형 로봇의 고차원 시각-운동 제어를 위해 저수준 모터 제어기와 고수준 작업 조정기를 계층적으로 구성하는 아키텍처를 제안한다. Motion capture 데이터로 사전학습된 저수준 sub-policy들을 고수준 controller가 시각 정보에 기반해 동적으로 선택하여 복잡한 humanoid 제어를 수행한다.
Evaluation
Novelty: 4/5 Technical Soundness: 3/5 Significance: 4/5 Clarity: 4/5 Overall: 4/5
총평: Motion capture 기반 저수준 제어와 시각-메모리 기반 고수준 조정을 결합하여 고복잡도 humanoid의 integrated visuomotor 제어를 달성한 우수한 연구로, 신경과학적 영감과 실제 구현의 균형이 잘 맞으며 ICLR 발표에 적합한 수준의 기여를 제시한다.