Essence
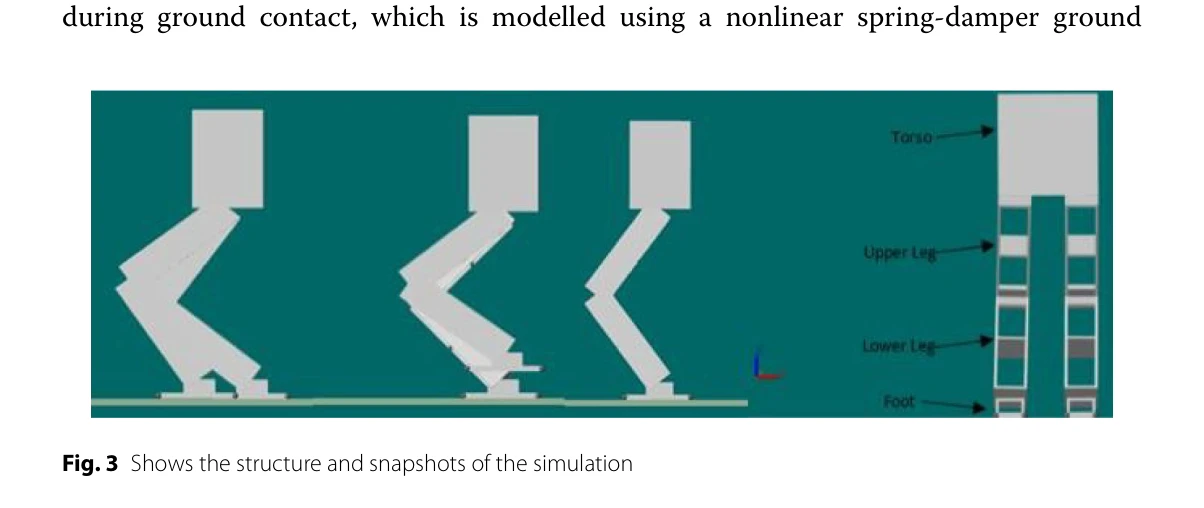
Fig. 3 Shows the structure and snapshots of the simulation
경사지면에서 이족 보행 로봇의 안정적이고 에너지 효율적인 보행을 위해 Slope Adaptive LIPM (SA-LIPM)을 기반으로 궤적 계획을 수행하고, 12-DOF 하체 로봇에서 ZMP 안정성, COM 궤적, 관절별 에너지 소비를 상세히 분석한다.
저자: Ruchir J. Desai, Yashavant D. Patel | 날짜: 12/2026 | DOI: 10.1186/s44147-026-01019-1 📄 PDF
Fig. 3 Shows the structure and snapshots of the simulation
경사지면에서 이족 보행 로봇의 안정적이고 에너지 효율적인 보행을 위해 Slope Adaptive LIPM (SA-LIPM)을 기반으로 궤적 계획을 수행하고, 12-DOF 하체 로봇에서 ZMP 안정성, COM 궤적, 관절별 에너지 소비를 상세히 분석한다.
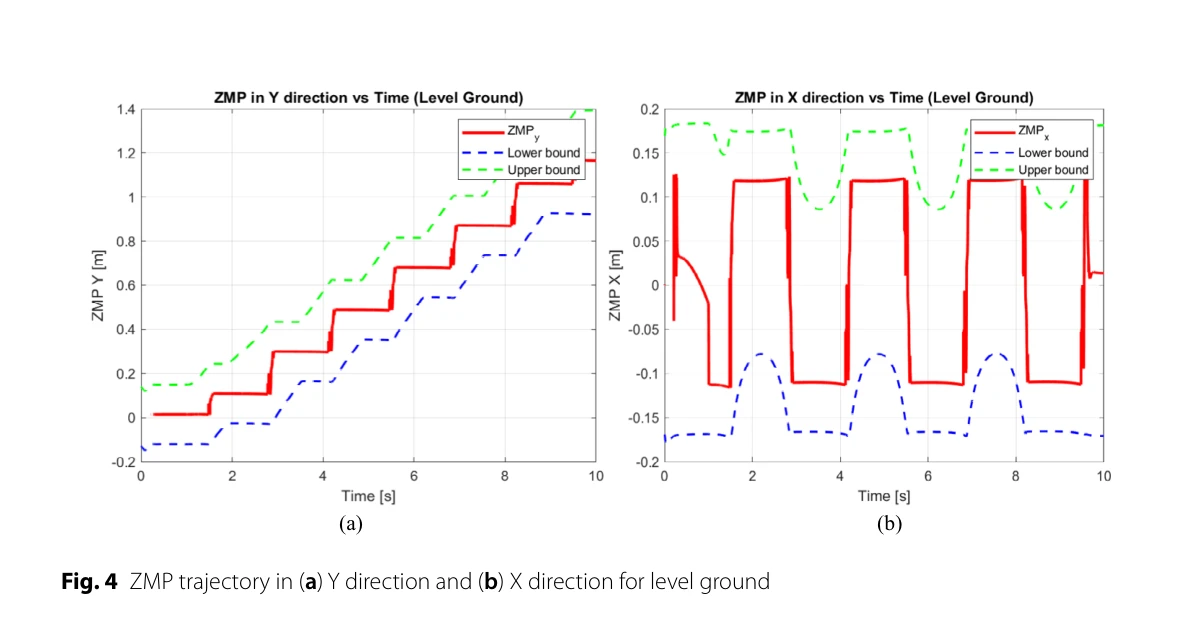
Figure 4a and b illustrates the ZMP trajectory in the Y-direction and X-direction with
Fig. 3 Shows the structure and snapshots of the simulation
총평: 본 논문은 경사지에서 이족 로봇의 보행 안정성과 에너지 효율성을 SA-LIPM 기반으로 체계적으로 분석한 중요한 연구이며, 관절별 에너지 감사를 통해 휴머노이드 로봇 설계에 실질적인 지침을 제공한다. 다만 더 가파른 경사와 실제 하드웨어 검증이 필요하다.