Essence
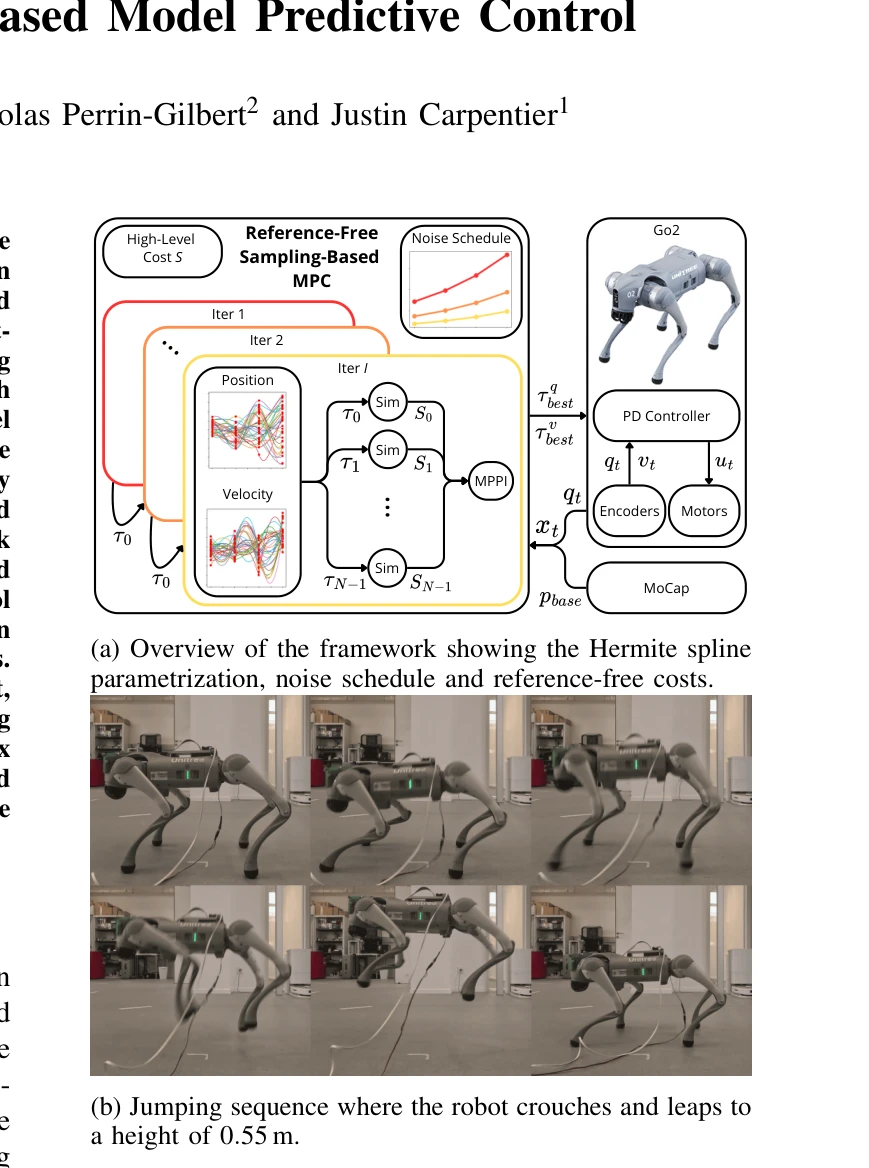
Fig. 1: Our reference-free sampling-based MPC framework
본 논문은 사전정의된 보행 패턴이나 접촉 시퀀스 없이 MPPI 기반의 샘플링 기반 MPC 프레임워크를 제안하여 emergent locomotion을 실현한다. Cubic Hermite spline 파라미터화를 통해 위치와 속도 제어점을 동시에 최적화하여 실시간 CPU 기반 제어를 가능하게 한다.
저자: Fabian Schramm, Pierre Fabre, Nicolas Perrin-Gilbert, Justin Carpentier | 날짜: 2025-11-24 | URL: https://arxiv.org/abs/2511.19204 📄 PDF
Fig. 1: Our reference-free sampling-based MPC framework
본 논문은 사전정의된 보행 패턴이나 접촉 시퀀스 없이 MPPI 기반의 샘플링 기반 MPC 프레임워크를 제안하여 emergent locomotion을 실현한다. Cubic Hermite spline 파라미터화를 통해 위치와 속도 제어점을 동시에 최적화하여 실시간 CPU 기반 제어를 가능하게 한다.
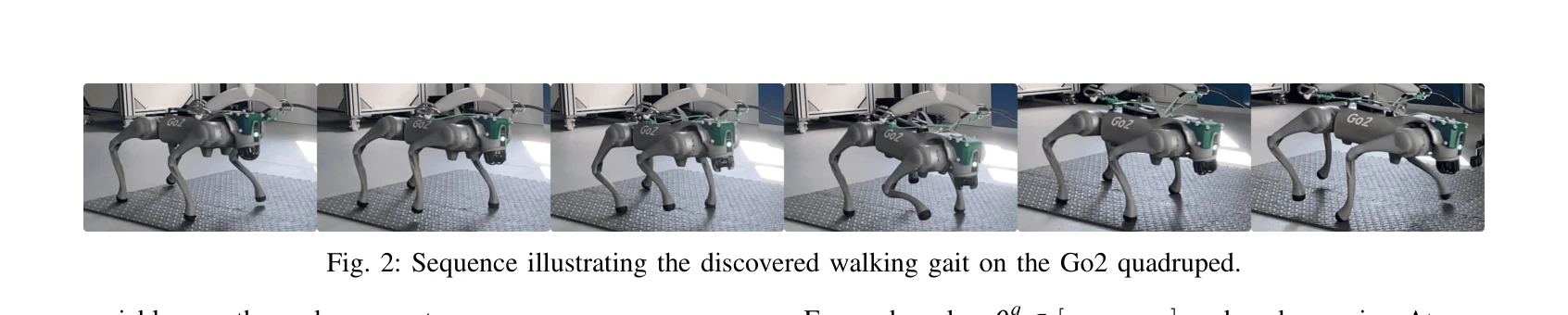
Fig. 2: Sequence illustrating the discovered walking gait on the Go2 quadruped.
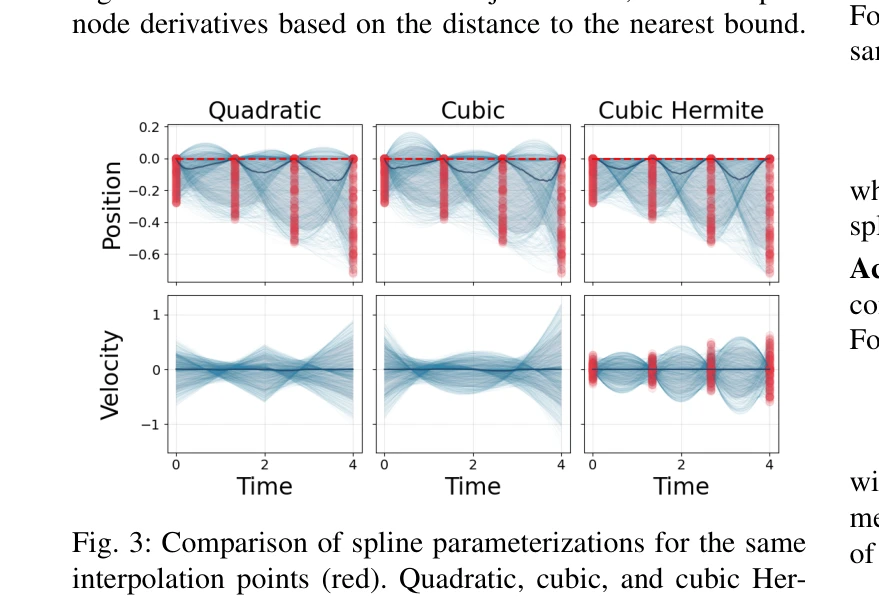
Fig. 3: Comparison of spline parameterizations for the same
총평: 본 논문은 참조 없는 emergent locomotion 발현, 극도의 샘플 효율성, 그리고 실시간 CPU 제어라는 세 가지 측면에서 우수한 기여를 제시한다. Cubic Hermite spline 파라미터화와 diffusion annealing의 조합은 창의적이며, Go2 로봇의 실제 검증은 신뢰성을 높인다. 다만 현실 로봇 검증의 범위 확대와 sim-to-real 갭 분석이 필요하다.