Essence
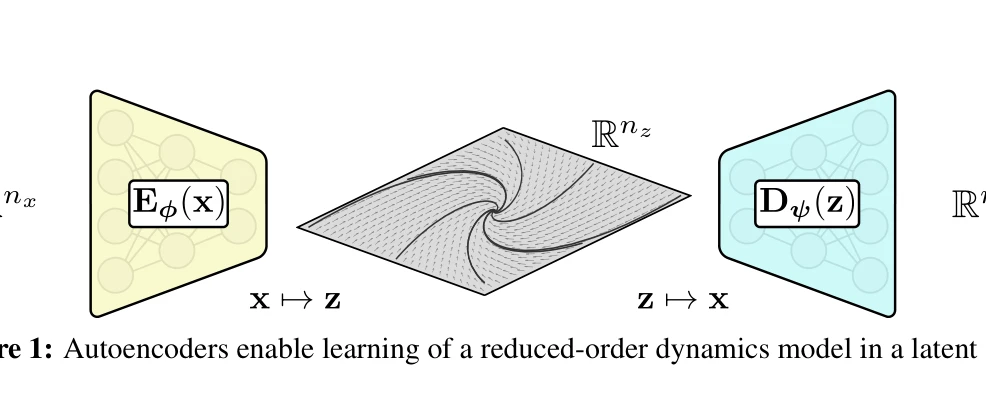
Figure 1: Autoencoders enable learning of a reduced-order dynamics model in a latent space.
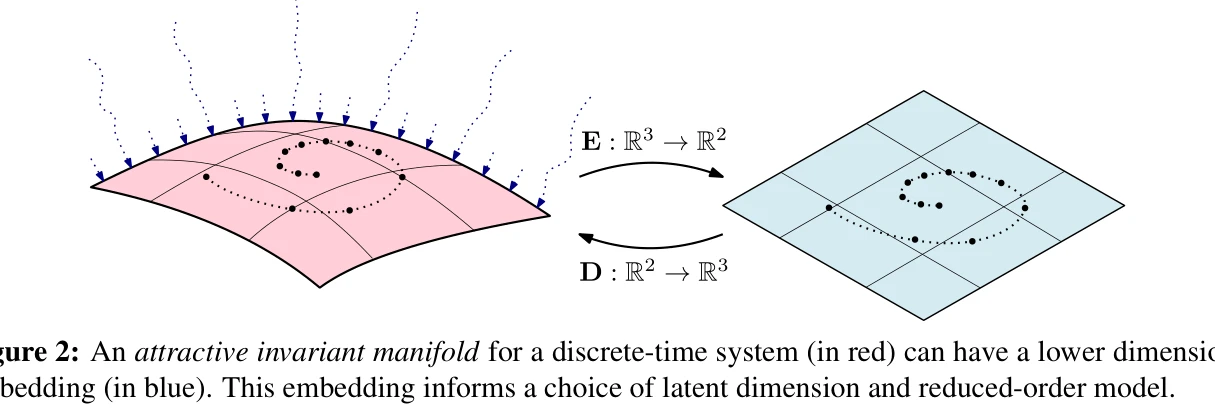
HALO는 autoencoder와 Poincaré map을 결합하여 다리 로봇 같은 hybrid 동역학 시스템의 주기적 운동을 저차원 latent space에서 학습하고 분석하는 프레임워크이다. Latent space에서 Lyapunov 분석을 수행하여 region of attraction을 구성하고 이를 전체 시스템으로 복원한다.
Evaluation
Novelty: 4/5 Technical Soundness: 3/5 Significance: 4/5 Clarity: 4/5 Overall: 4/5
총평: HALO는 hybrid locomotion dynamics의 안정성 분석을 위해 autoencoder와 Poincaré map을 창의적으로 결합한 우수한 연구이며, latent space의 안정성 속성이 전체 시스템으로 이전된다는 것을 실험적으로 입증한다. 이론과 실험의 균형이 좋으나, 복잡한 시스템에서의 reconstruction 오차 처리와 robust 안정성 보장에 대한 더 깊은 분석이 필요하다.