Achievement
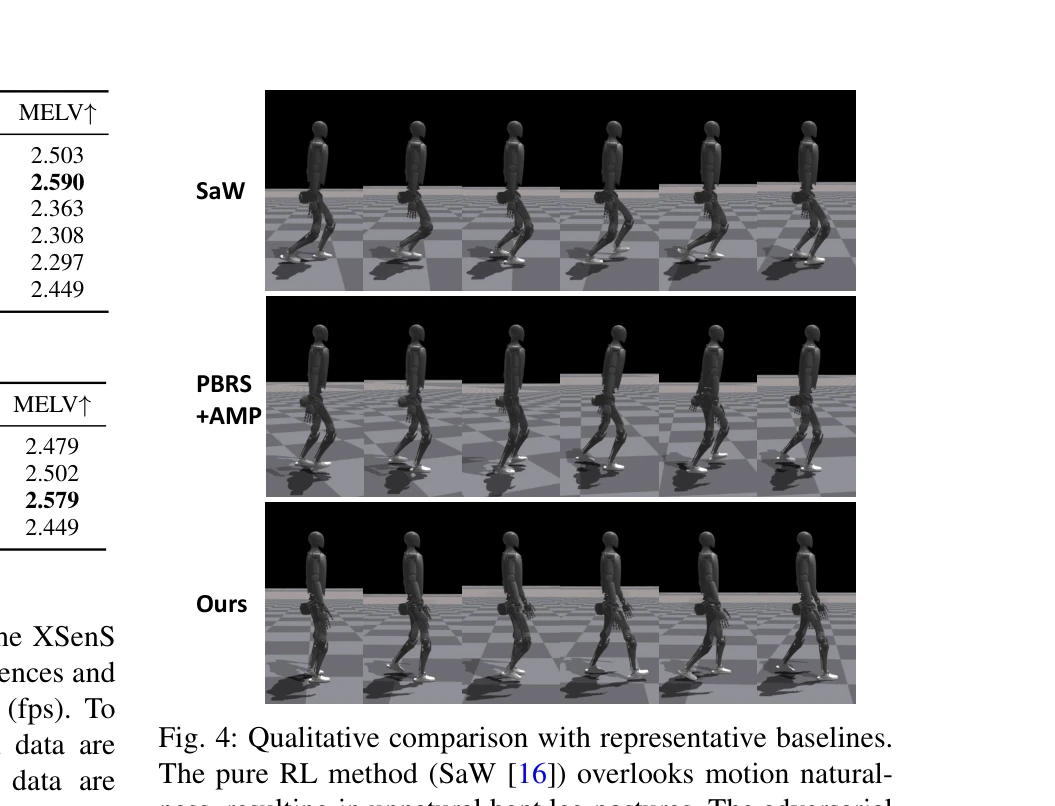
Fig. 4: Qualitative comparison with representative baselines.
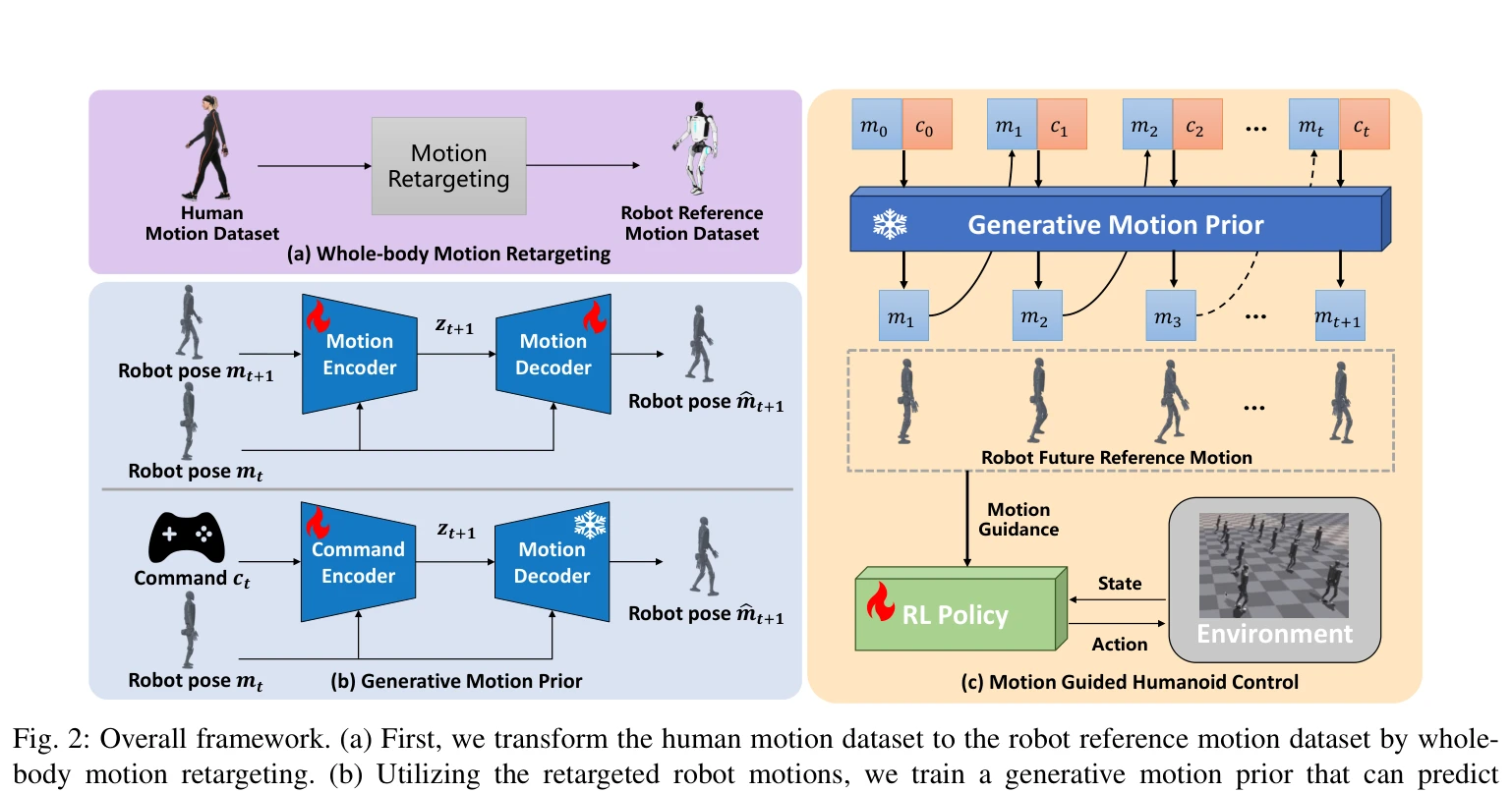
- GMP 프레임워크 제안: Frozen generative model을 expert로 활용하는 혁신적 프레임워크로 robust하고 stable한 guidance 제공
- Fine-grained motion guidance: Whole-body reference motion trajectories를 생성하고 motion guidance rewards를 설계하여 granular하고 interpretable한 RL policy 학습 실현
- SOTA 성능 달성: 시뮬레이션 및 실제 환경에서 기존 방법들 대비 superior motion naturalness 달성
- Learning stability 개선: Adversarial training을 제거함으로써 mode collapse 없이 안정적인 학습 실현