Essence
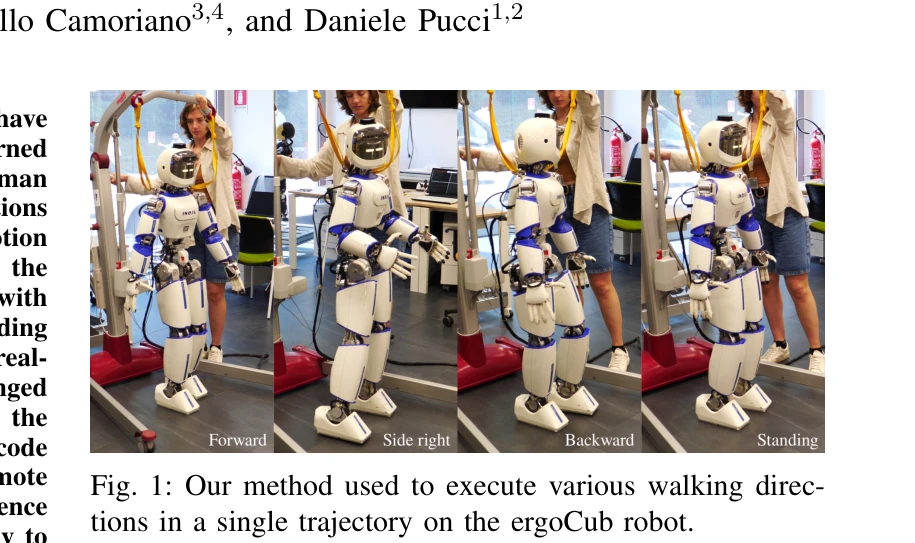
Fig. 1: Our method used to execute various walking direc-
인간형 로봇의 궤적 생성에 물리 기반 학습과 제어 기반 보정을 결합하여 모방학습의 안정성을 향상시키는 방법을 제안한다. Physics-informed loss와 PI 제어기를 통해 물리 법칙 위반을 줄이고 실제 로봇에서의 안정성을 개선한다.
저자: Evelyn D'Elia, Paolo Maria Viceconte, Lorenzo Rapetti, Diego Ferigo, Giulio Romualdi, Giuseppe L'Erario, Raffaello Camoriano, Daniele Pucci | 날짜: 2025-09-29 | URL: https://arxiv.org/abs/2509.24697 📄 PDF
Fig. 1: Our method used to execute various walking direc-
인간형 로봇의 궤적 생성에 물리 기반 학습과 제어 기반 보정을 결합하여 모방학습의 안정성을 향상시키는 방법을 제안한다. Physics-informed loss와 PI 제어기를 통해 물리 법칙 위반을 줄이고 실제 로봇에서의 안정성을 개선한다.
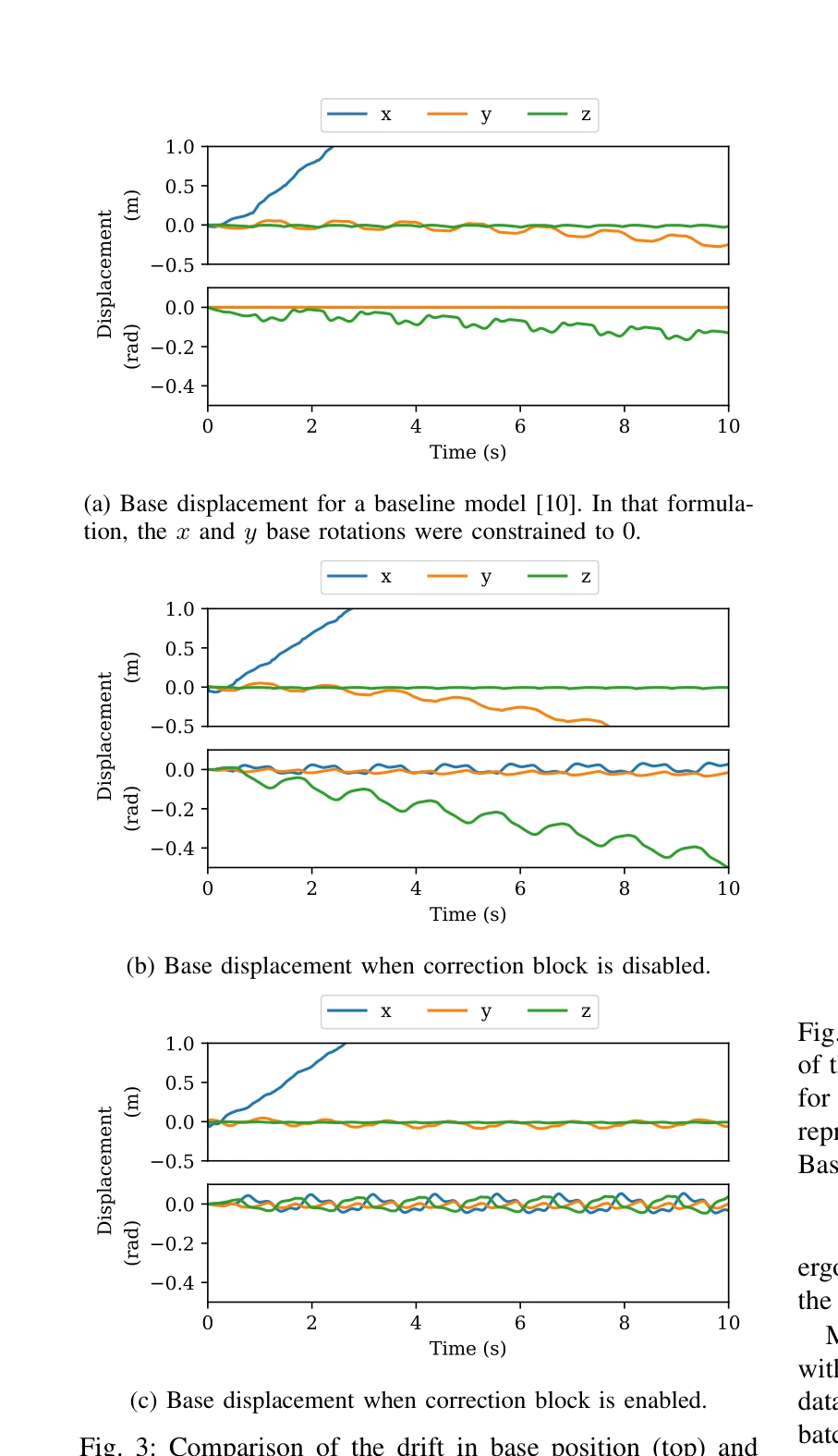
Fig. 3: Comparison of the drift in base position (top) and
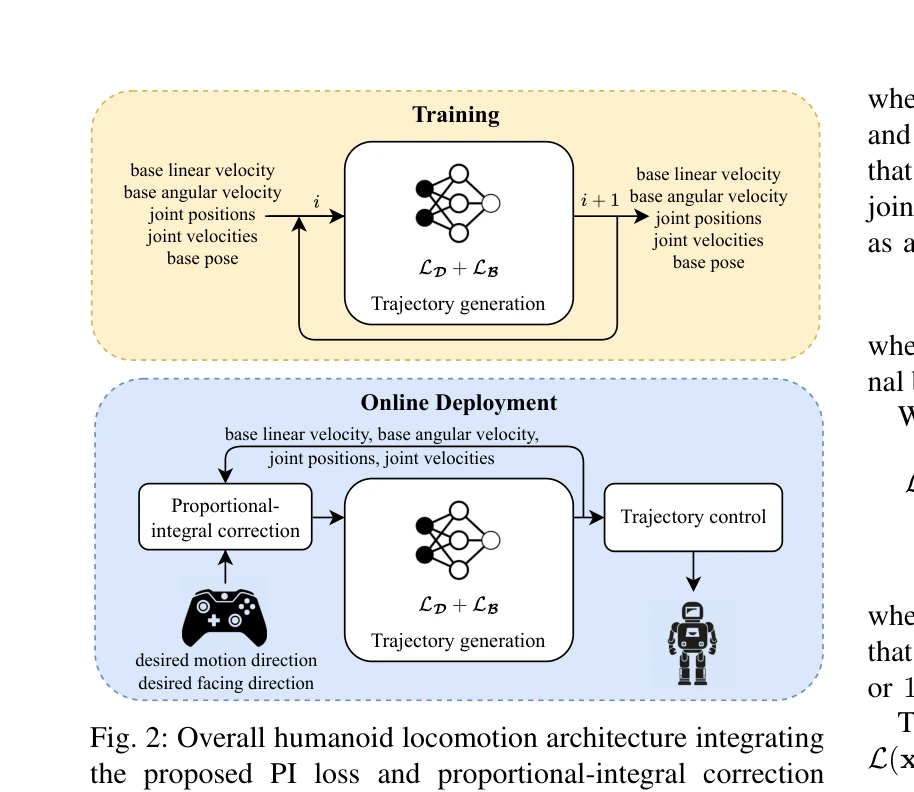
Fig. 2: Overall humanoid locomotion architecture integrating
총평: 본 논문은 물리 기반 학습과 제어 이론을 효과적으로 결합하여 인간형 로봇 궤적 생성의 실제 안정성을 향상시키는 실질적이고 모듈식의 접근법을 제시한다. 특히 미분가능한 물리 제약 인코딩과 추론 단계의 PI 제어 보정은 구현이 간단하면서도 실증적 효과가 크며, 실제 로봇 검증으로 산업 적용 가능성을 보여준다.