Essence
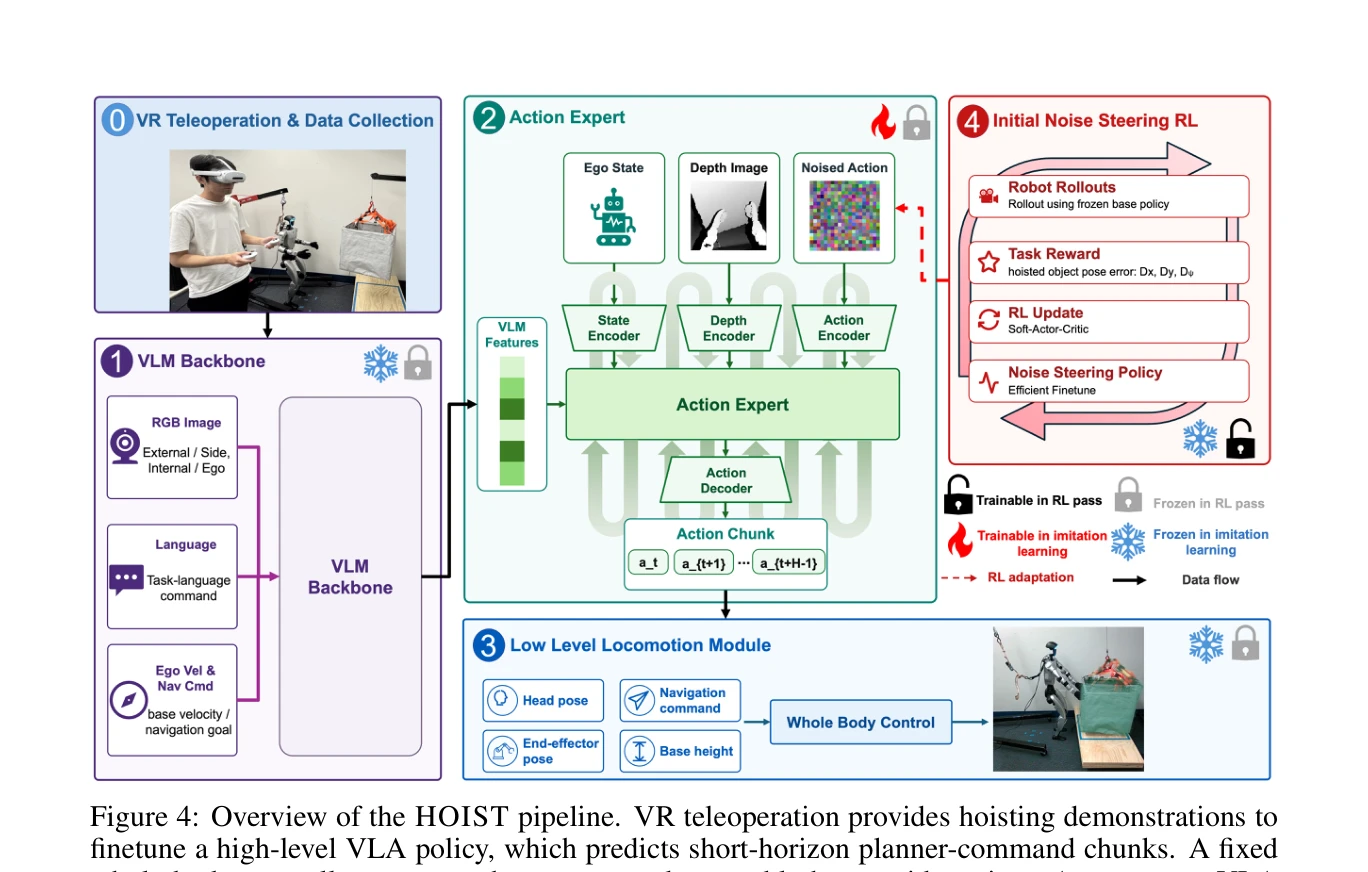
Figure 4: Overview of the HOIST pipeline. VR teleoperation provides hoisting demonstrations to
본 논문은 인도형(underactuated) 부유 하중(suspended load)을 조작하는 휴머노이드 로봇을 위한 HOIST를 제시한다. VR 원격 조종 데이터로부터 vision-language-action(VLA) 정책을 미세조정하고, whole-body controller를 통해 실행한 후, iterative batched reinforcement learning으로 배치 정확도와 정지 행동을 개선한다.
Evaluation
Novelty: 4/5 Technical Soundness: 4/5 Significance: 4/5 Clarity: 4/5 Overall: 4/5
총평: HOIST는 휴머노이드 로봇을 이용한 underactuated material-handling이라는 새로운 실제 문제를 잘 정의하고, imitation learning과 reinforcement learning을 실용적으로 결합한 효과적인 해결 방안을 제시한다. VR teleoperation 기반의 데이터 수집부터 whole-body control과 sample-efficient RL까지 완전한 파이프라인을 구현하고, 시뮬레이션과 실제 로봇 모두에서 검증한 점이 강점이다. 다만 일반화 능력 검증과 안전 보장의 명시적 분석이 부족하고, 더 다양한 시나리오에서의 평가가 필요하다.