Essence
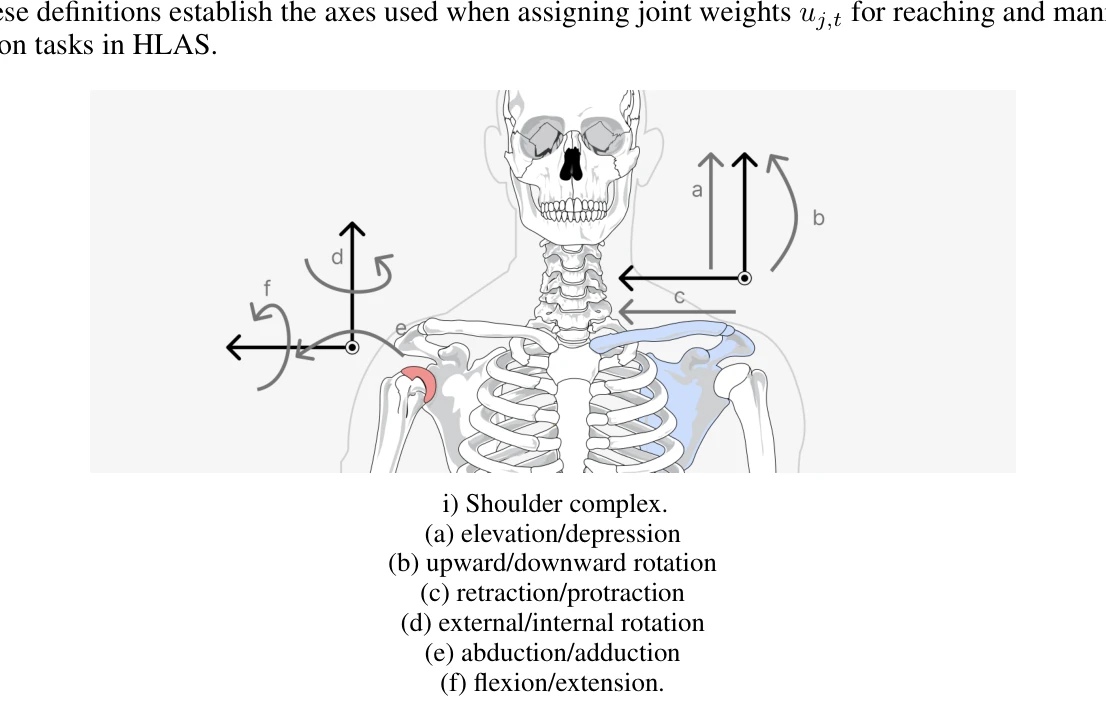
Figure 1: Upper body atlas I: Shoulder complex including scapulothoracic contributions. Origins
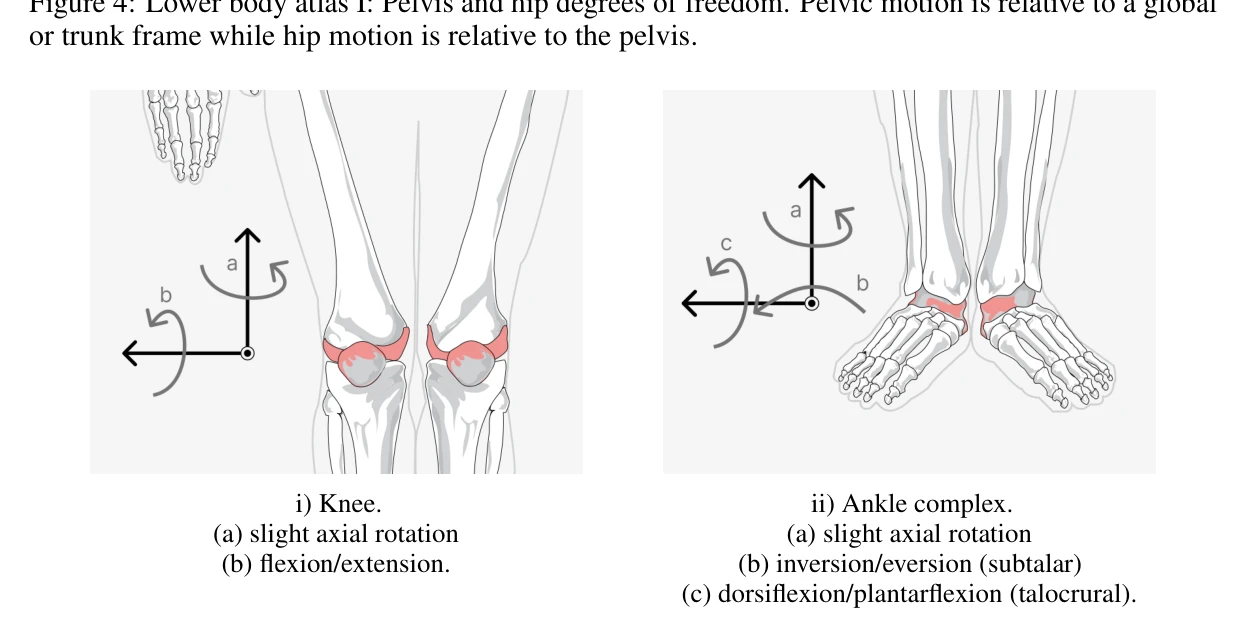
이 논문은 인간형 로봇의 구동부(actuation)가 인간 수준인지를 객관적으로 측정하고 비교할 수 있는 포괄적 프레임워크를 제시한다. 세 가지 핵심 요소로 구성되는데, 첫째는 ISB 기반 kinematic DoF atlas로 관절 좌표계를 표준화하고, 둘째는 Human-Equivalence Envelopes(HEE)로 특정 관절각도와 각속도에서 인간의 토크와 파워를 동시에 만족하는 요구사항을 정의하며, 셋째는 Human-Level Actuation Score(HLAS)로 workspace coverage, 효율성, 열 지속성 등 여섯 가지 인자를 통합한다.
Achievement
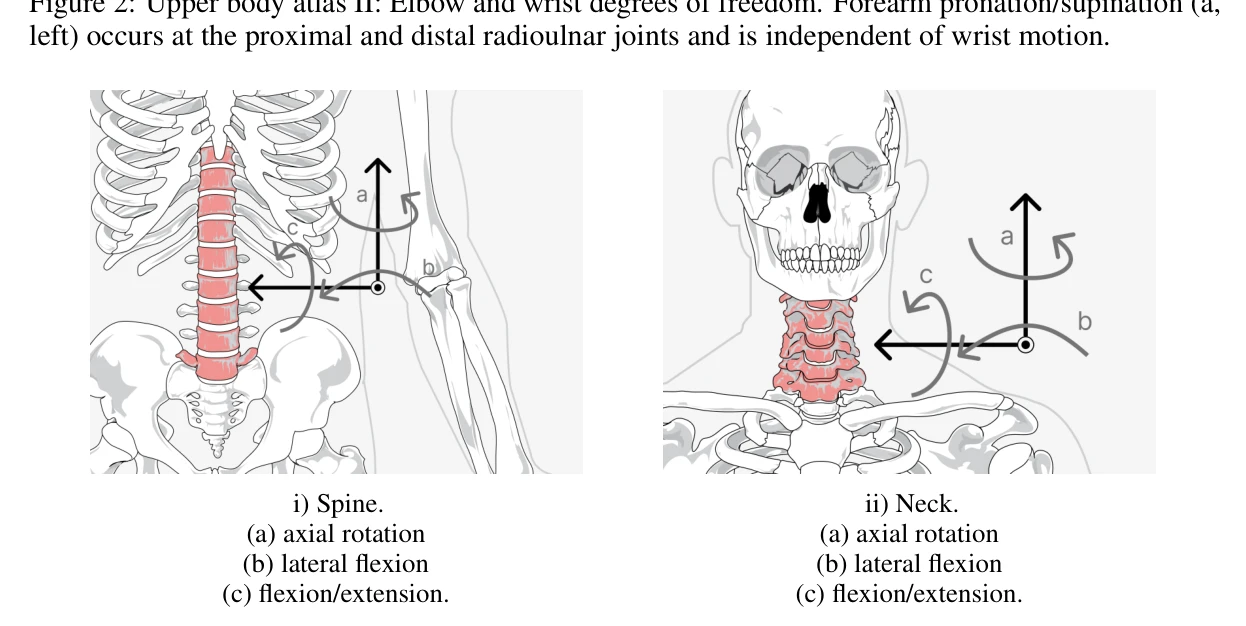
Figure 3: Upper body atlas III: Thoracolumbar spine and cervical spine (neck) degrees of freedom.
주요 성과는 다음과 같다: 1. 표준화된 kinematic 기준 확립: ISB 기반 DoF atlas를 통해 인간-로봇 관절 비교의 모호성을 제거하고 일관된 좌표계 제공. 2. 객관적 성능 정의: Human-Equivalence Envelopes는 관절각도 q와 각속도 ω의 함수로 토크와 파워 요구사항을 동시에 규정하여 peak spec의 한계 극복. 3. 포괄적 평가 메트릭: HLAS는 workspace, 효율성, 열 지속성 등 multiple factors를 통합하여 actuator trade-off를 노출. 4. 재현 가능한 측정 프로토콜: dynamometry, electrical power monitoring, thermal testing을 통해 모든 HLAS 입력을 재현 가능한 실험으로부터 도출하는 상세한 방법론 제시. 5. 실제 사례 제시: multi-joint humanoid에 대한 HLAS 계산 예시가 gearing ratio와 bandwidth/efficiency 간의 trade-off를 명확히 드러냄.
Evaluation
Novelty: 4/5 Technical Soundness: 4/5 Significance: 4/5 Clarity: 4/5 Overall: 4/5
총평: 이 논문은 humanoid robot 개발에서 오래도록 미해결되어 온 정량화 문제를 강력한 이론적 기반(ISB kinematic conventions, human biomechanics 데이터) 위에서 처음으로 체계적으로 해결한다. Human-Equivalence Envelopes와 HLAS는 설계자에게 명확한 목표를 제공하고, task-relevant posture-rate bands에 기반한 가중치 부여는 실무적 타당성을 보장한다. 제안된 측정 프로토콜(dynamometry, thermal testing)은 재현 가능하고 표준화 가능하여 산업 표준으로 채택될 수 있는 잠재력이 크다. 다만 75kg 기준 신체에 대한 의존도와 실험실 기반 biomechanics 데이터의 현장 적용성 한계는 보완이 필요하다. 전반적으로 humanoid actuation 평가에 새로운 표준을 제시하는 중요한 기여로, robotics, biomechanics, benchmarking 커뮤니티에 광범위한 영향을 미칠 것으로 예상된다.