Essence
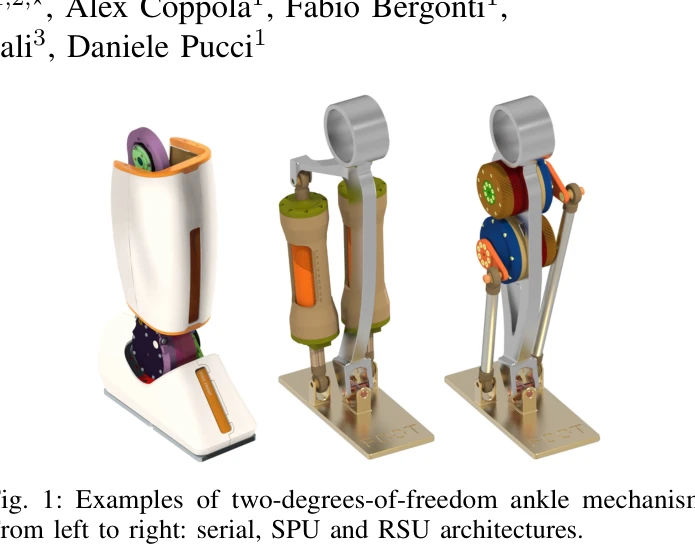
Fig. 1: Examples of two-degrees-of-freedom ankle mechanisms.
휴머노이드 로봇의 발목 설계를 위한 통합 프레임워크를 제시하며, SPU 및 RSU 병렬 메커니즘에 대한 다목적 최적화를 통해 최적 구성을 도출한다.
저자: Guglielmo Cervettini, Roberto Mauceri, Alex Coppola, Fabio Bergonti, Luca Fiorio, Marco Maggiali, Daniele Pucci | 날짜: 2025-09-19 | URL: https://arxiv.org/abs/2509.16469 📄 PDF
Fig. 1: Examples of two-degrees-of-freedom ankle mechanisms.
휴머노이드 로봇의 발목 설계를 위한 통합 프레임워크를 제시하며, SPU 및 RSU 병렬 메커니즘에 대한 다목적 최적화를 통해 최적 구성을 도출한다.
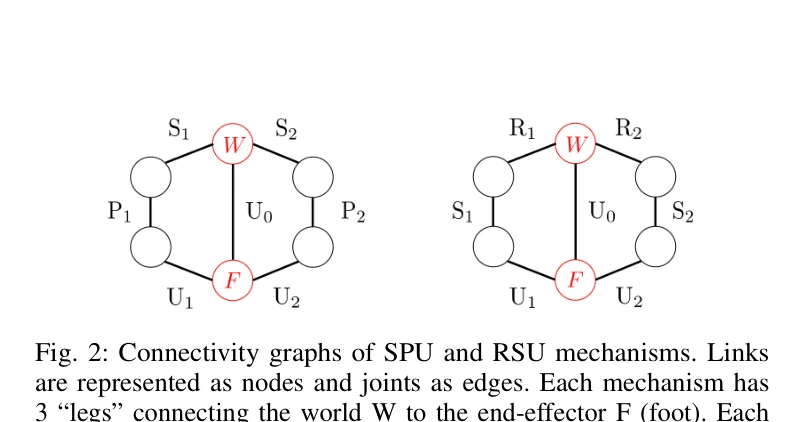
Fig. 2: Connectivity graphs of SPU and RSU mechanisms. Links
총평: 본 논문은 휴머노이드 로봇 발목 설계의 오랜 난제인 아키텍처 선택과 파라미터 최적화를 체계적이고 정량적으로 해결하는 통합 프레임워크를 제시하며, 실제 로봇 재설계를 통한 유의미한 성능 개선으로 실용성을 입증하였다.