저자: Ying Zheng, Lei Yao, Yuejiao Su, Yi Zhang, Yi Wang, Sicheng Zhao, Yiyi Zhang, Lap-Pui Chau | 날짜: 2024-08-21 | URL: https://arxiv.org/abs/2408.11537 📄 PDF
Essence
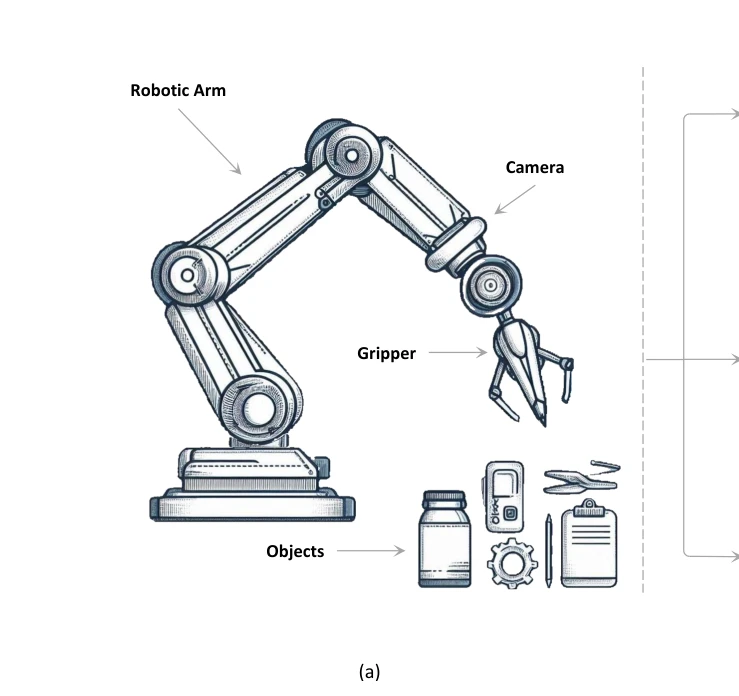
Fig. 1. An illustration of robotic manipulation system (left) and the typology of embodied learning methods for object-c
본 논문은 object-centric robotic manipulation을 위한 embodied learning의 최신 동향을 체계적으로 조사하며, embodied perceptual learning, embodied policy learning, embodied task-oriented learning의 세 가지 주요 분야로 분류하여 종합적인 서베이를 제공한다.
Evaluation
Novelty: 4/5 Technical Soundness: 4/5 Significance: 4/5 Clarity: 4/5 Overall: 4/5
총평: 본 논문은 object-centric robotic manipulation을 위한 embodied learning의 최신 동향을 체계적이고 포괄적으로 정리한 우수한 서베이이며, 기존 연구와 달리 최신 generative/foundation models을 포함하고 perception-policy-task의 통합적 관점을 제시함으로써 로봇 조작 분야 연구자들에게 매우 유용한 참고자료가 될 것으로 판단된다.