Essence
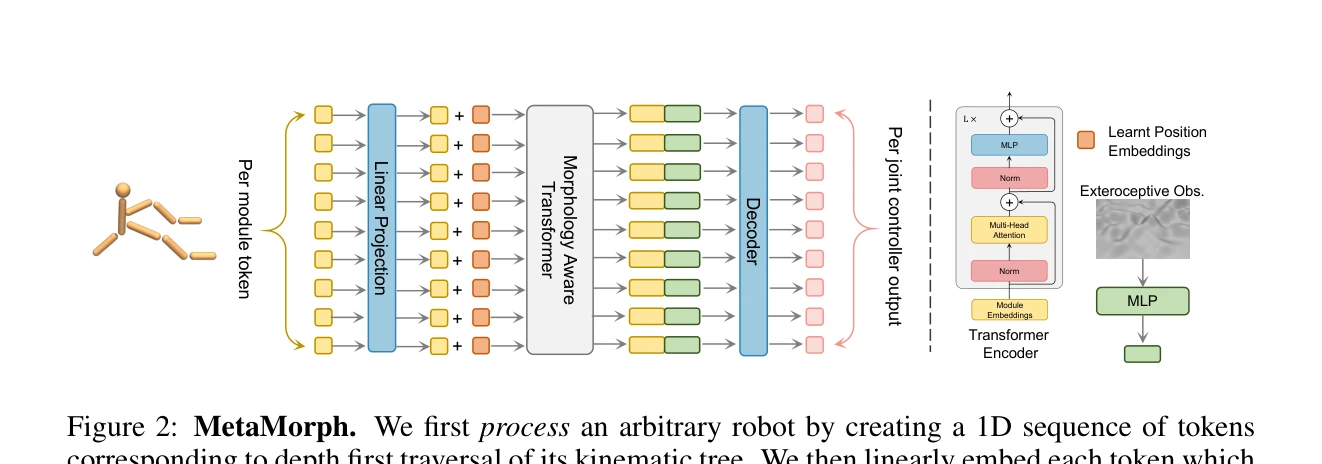
Figure 2: MetaMorph. We first process an arbitrary robot by creating a 1D sequence of tokens
Transformer 기반의 MetaMorph을 제안하여 모듈식 로봇 설계 공간에서 다양한 로봇 형태에 대해 일반화 가능한 범용 제어기를 학습한다. 로봇의 형태정보를 Transformer의 조건화 모달리티로 취급하여 조합적 일반화와 제로샷 일반화를 달성한다.
저자: Agrim Gupta, Linxi Fan, Surya Ganguli, Li Fei-Fei | 날짜: 2022-03-22 | URL: https://arxiv.org/abs/2203.11931 📄 PDF
Figure 2: MetaMorph. We first process an arbitrary robot by creating a 1D sequence of tokens
Transformer 기반의 MetaMorph을 제안하여 모듈식 로봇 설계 공간에서 다양한 로봇 형태에 대해 일반화 가능한 범용 제어기를 학습한다. 로봇의 형태정보를 Transformer의 조건화 모달리티로 취급하여 조합적 일반화와 제로샷 일반화를 달성한다.
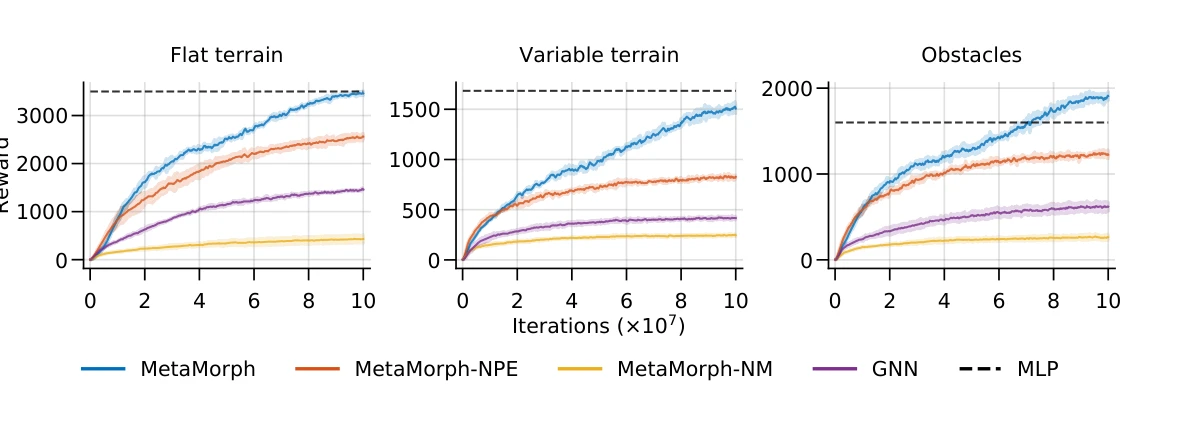
Figure 4: Joint pre-training of modular robots. Mean reward progression of 100 robots from the
Figure 2: MetaMorph. We first process an arbitrary robot by creating a 1D sequence of tokens
총평: 본 논문은 로봇 공학에서 Transformer 기반 범용 제어기 학습의 새로운 패러다임을 제시하며, 높은 제어복잡도의 다양한 로봇 형태에 대한 제로샷 일반화를 달성했다. 모듈식 로봇 시스템의 실용화를 위한 중요한 기여이나, 실제 하드웨어 검증과 다른 설계 공간으로의 일반화가 후속과제이다.