Essence
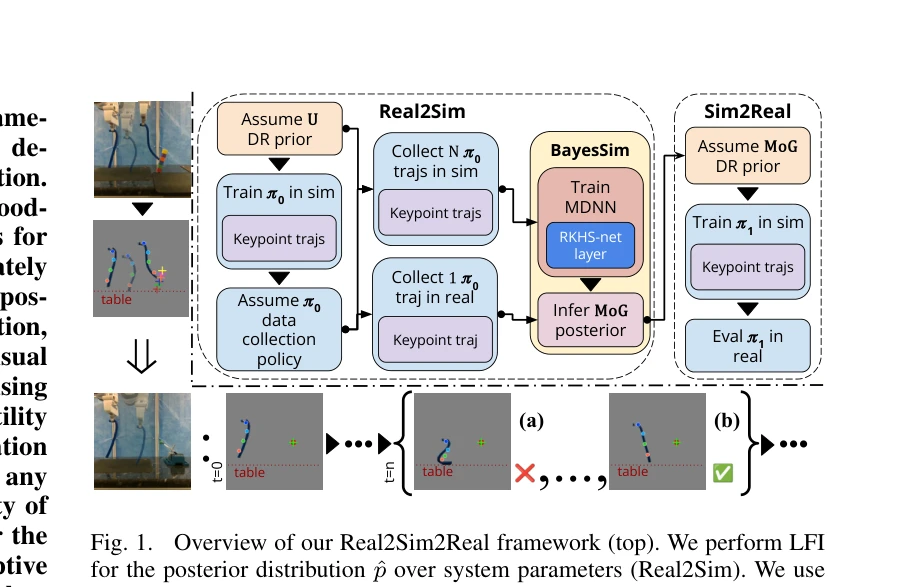
Fig. 1.
Deformable Linear Object(DLO) 조작을 위해 likelihood-free inference로 물리 파라미터의 사후분포를 추정하고, 이를 domain randomisation에 활용하여 시뮬레이션에서 학습한 정책을 실제 환경에 zero-shot으로 배포하는 end-to-end Real2Sim2Real 프레임워크를 제시한다.
저자: Georgios Kamaras, Subramanian Ramamoorthy | 날짜: 2025-02-25 | URL: https://arxiv.org/abs/2502.18615 📄 PDF
Fig. 1.
Deformable Linear Object(DLO) 조작을 위해 likelihood-free inference로 물리 파라미터의 사후분포를 추정하고, 이를 domain randomisation에 활용하여 시뮬레이션에서 학습한 정책을 실제 환경에 zero-shot으로 배포하는 end-to-end Real2Sim2Real 프레임워크를 제시한다.
Fig. 1.
Fig. 1.
총평: 본 논문은 LFI 기반 파라미터 추정과 domain randomisation, model-free RL을 정교하게 통합하여 vision-based DLO 조작의 Real2Sim2Real 문제를 해결하는 novel하고 기술적으로 견고한 접근을 제시하며, zero-shot deployment의 실증을 통해 실용적 가치를 입증한다.