Essence
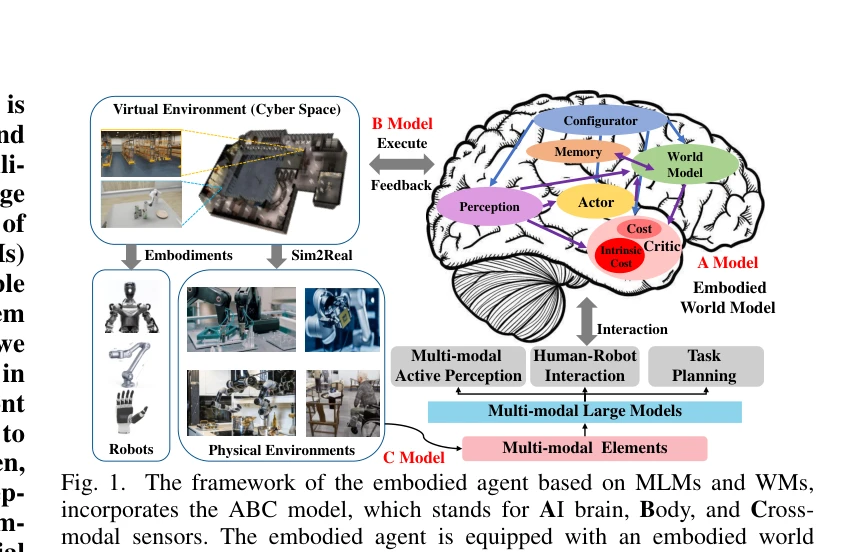
Fig. 1. The framework of the embodied agent based on MLMs and WMs,
본 논문은 Embodied AI의 포괄적인 조사로, 사이버 공간과 물리 세계의 정렬을 목표로 Multi-modal Large Models (MLMs)과 World Models (WMs)의 최신 발전을 다룬다. Embodied perception, embodied interaction, embodied agent, sim-to-real adaptation의 네 가지 주요 연구 대상을 중심으로 최신 방법론과 데이터셋을 종합적으로 분석한다.
Evaluation
Novelty: 4/5 Technical Soundness: 4/5 Significance: 5/5 Clarity: 4/5 Overall: 4/5
총평: 본 논문은 MLMs 시대의 Embodied AI에 대한 첫 번째 포괄적 survey로서, embodied robots, simulators, perception, interaction, agents, sim-to-real adaptation을 체계적으로 정리하고 ARIO 데이터셋을 제안하여 연구 커뮤니티에 큰 기여를 한다. 다만 빠르게 발전하는 분야의 특성상 지속적인 업데이트가 필요하며, 실제 로봇 환경에서의 일반화 성능 검증이 향후 과제이다.