Essence
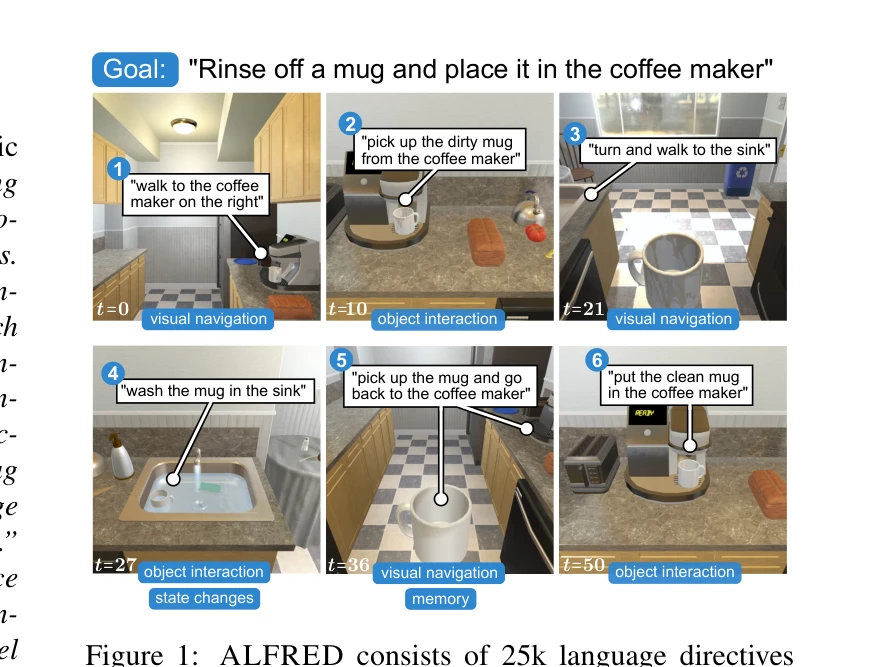
Figure 1: ALFRED consists of 25k language directives
ALFRED는 자연어 지시사항과 egocentric vision에서 가정용 작업을 위한 action sequence로의 매핑을 학습하기 위한 벤치마크로, 25k개의 자연어 지시문과 비가역적 상태 변화를 포함하여 실제 로봇 응용과의 간극을 줄인다.
저자: Mohit Shridhar, Jesse Thomason, Daniel Gordon, Yonatan Bisk, Winson Han, Roozbeh Mottaghi, Luke Zettlemoyer, Dieter Fox | 날짜: 2019-12-03 | URL: https://arxiv.org/abs/1912.01734 📄 PDF
Figure 1: ALFRED consists of 25k language directives
ALFRED는 자연어 지시사항과 egocentric vision에서 가정용 작업을 위한 action sequence로의 매핑을 학습하기 위한 벤치마크로, 25k개의 자연어 지시문과 비가역적 상태 변화를 포함하여 실제 로봇 응용과의 간극을 줄인다.
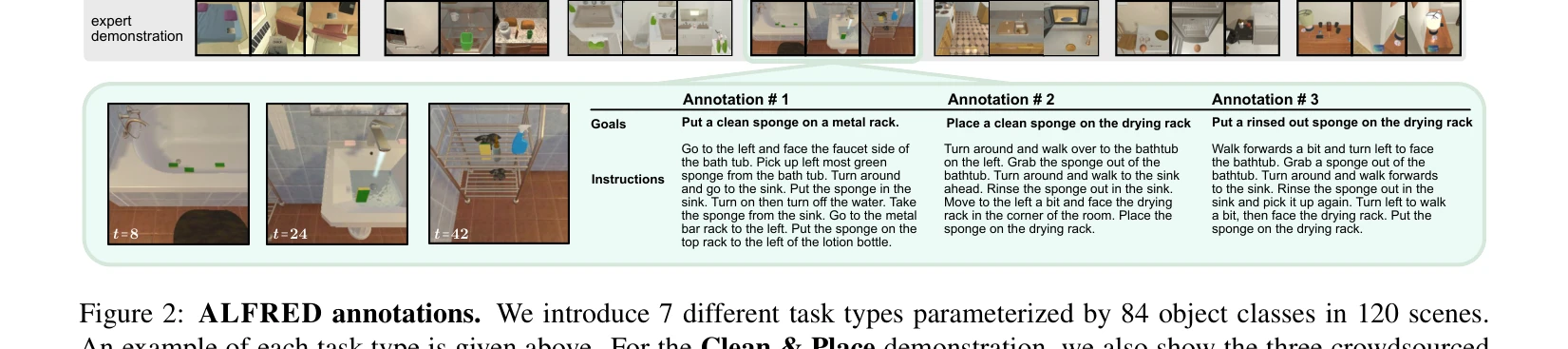
Figure 2: ALFRED annotations. We introduce 7 different task types parameterized by 84 object classes in 120 scenes.
Figure 2: ALFRED annotations. We introduce 7 different task types parameterized by 84 object classes in 120 scenes.
총평: ALFRED는 자연언어에서 행동으로의 grounding 연구에 현실적인 도전 과제들을 종합적으로 제시하는 중요한 벤치마크이다. 고수준/저수준 언어 주석, 비가역적 상태 변화, pixelwise interaction mask 등의 혁신적 설계가 기존 데이터셋보다 실제 로봇 응용에 더 가깝다.