Essence
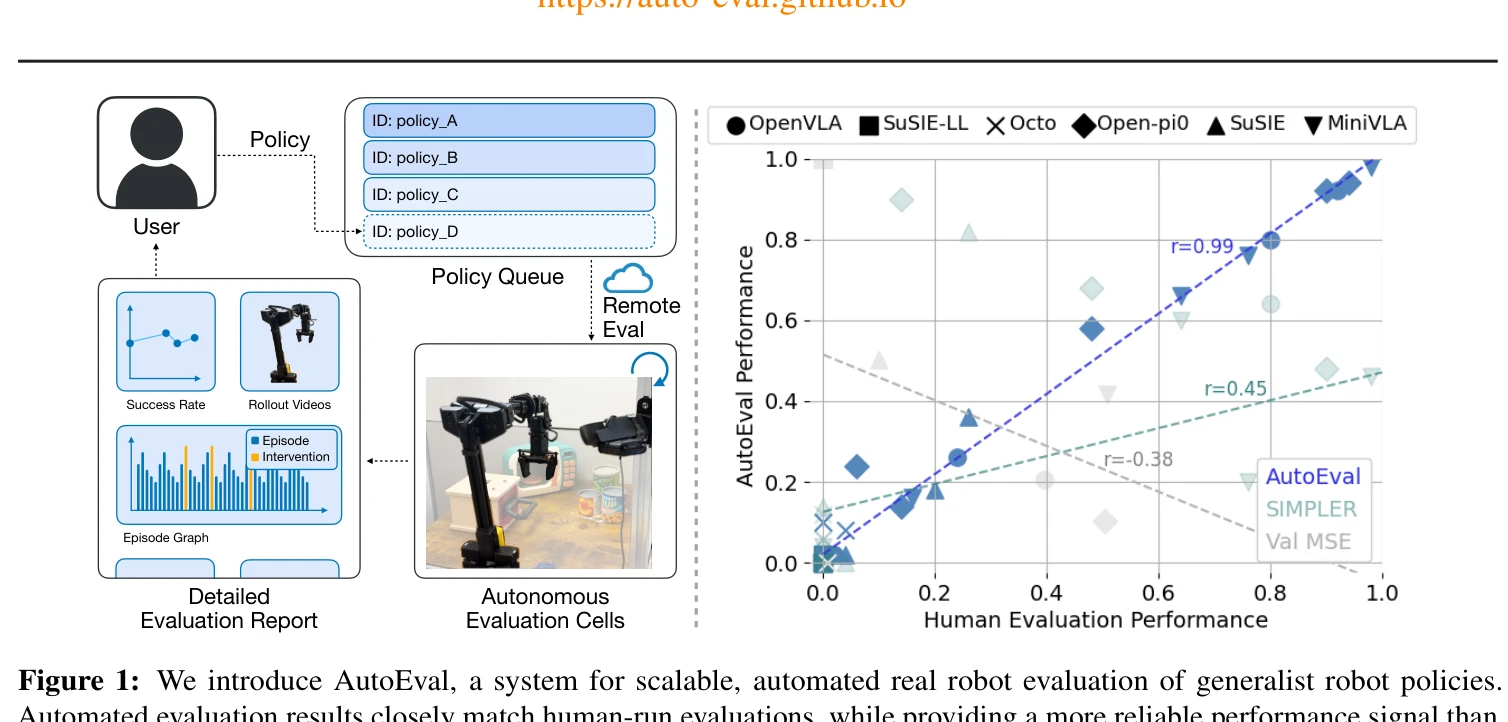
Figure 1: We introduce AutoEval, a system for scalable, automated real robot evaluation of generalist robot policies.
AutoEval은 대규모 로봇 정책 평가의 병목을 해결하기 위해 자동화된 성공 감지와 장면 리셋 기능을 갖춘 실세계 자율 평가 시스템으로, 인간 개입을 99% 이상 감소시키면서 24시간 연속 평가를 가능하게 한다.
저자: Zhiyuan Zhou, Pranav Atreya, You Liang Tan, Karl Pertsch, Sergey Levine | 날짜: 2025-03-31 | URL: https://arxiv.org/abs/2503.24278 📄 PDF
Figure 1: We introduce AutoEval, a system for scalable, automated real robot evaluation of generalist robot policies.
AutoEval은 대규모 로봇 정책 평가의 병목을 해결하기 위해 자동화된 성공 감지와 장면 리셋 기능을 갖춘 실세계 자율 평가 시스템으로, 인간 개입을 99% 이상 감소시키면서 24시간 연속 평가를 가능하게 한다.
Figure 1: We introduce AutoEval, a system for scalable, automated real robot evaluation of generalist robot policies.
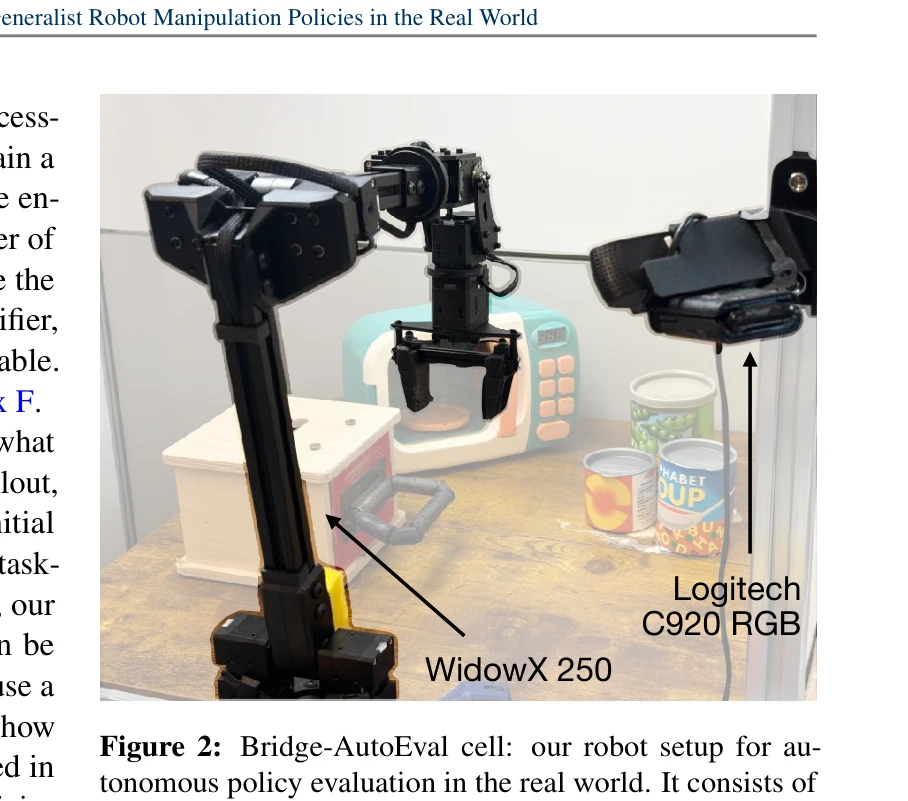
Figure 2: Bridge-AutoEval cell: our robot setup for au-
총평: AutoEval은 generalist 로봇 정책 평가의 심각한 확장성 문제를 실질적으로 해결하는 혁신적인 시스템으로, 자동화된 리셋과 성공 감지를 통해 인간 개입을 극적으로 줄이면서도 신뢰할 수 있는 결과를 제공한다. 공개 벤치마킹 플랫폼 제공으로 로봇 학습 커뮤니티에 중대한 기여를 한다.