저자: Pranav Atreya, Karl Pertsch, Tony Lee, Moo Jin Kim, Arhan Jain, Artur Kuramshin, Clemens Eppner, Cyrus Neary, Edward Hu, Fabio Ramos, Jonathan Tremblay, Kanav Arora, Kirsty Ellis, Luca Macesanu, Marcel Torne Villasevil, Matthew Leonard, Meedeum Cho, Ozgur Aslan, Shivin Dass, Jie Wang, William Reger, Xingfang Yuan, Xuning Yang, Abhishek Gupta, Dinesh Jayaraman, Glen Berseth, Kostas Daniilidis, Roberto Martin-Martin, Youngwoon Lee, Percy Liang, Chelsea Finn, Sergey Levine | 날짜: 2025-06-22 | URL: https://arxiv.org/abs/2506.18123 📄 PDF
Essence
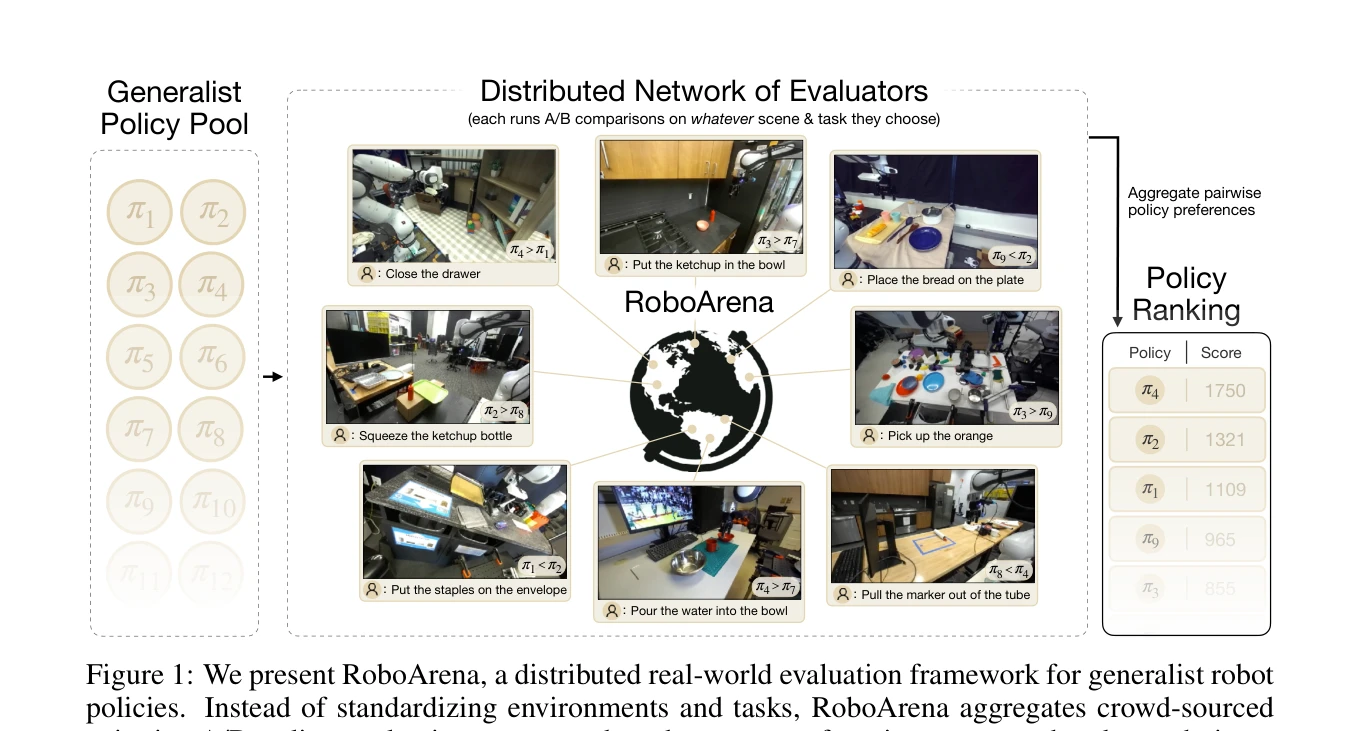
Figure 1: We present RoboArena, a distributed real-world evaluation framework for generalist robot
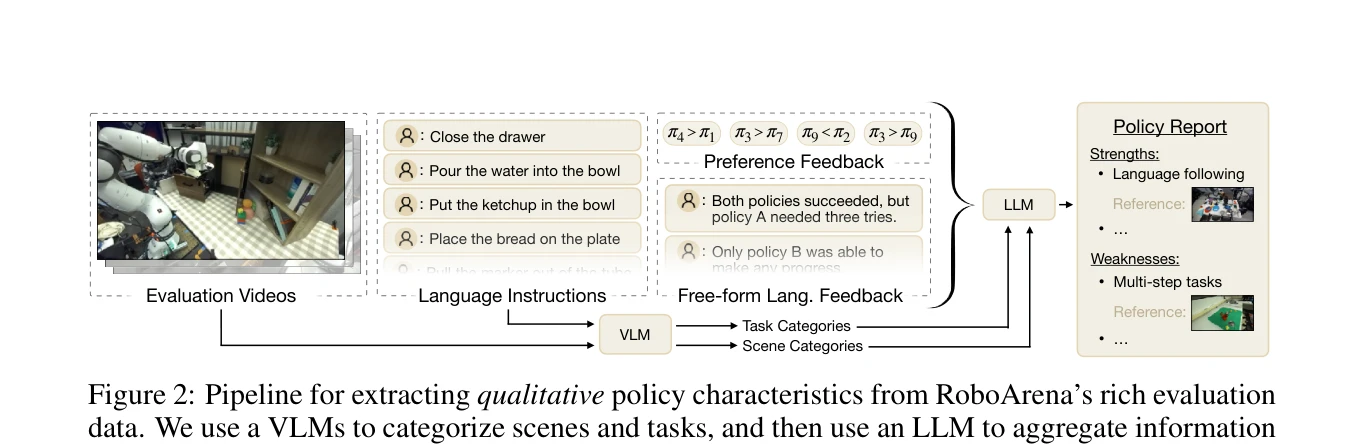
RoboArena는 분산된 평가자 네트워크를 통해 실제 환경에서 일반화된 로봇 정책을 pairwise 비교하고 집계하여 정책 순위를 도출하는 크라우드소싱 기반 평가 프레임워크이다. 600회 이상의 실제 로봇 평가를 통해 중앙 집중식 평가보다 정확한 정책 순위를 제공함을 입증했다.
Evaluation
Novelty: 4/5 Technical Soundness: 3/5 Significance: 4/5 Clarity: 4/5 Overall: 4/5
총평: RoboArena는 일반화 로봇 정책의 평가라는 중요한 문제에 대해 혁신적인 분산 크라우드소싱 접근법을 제시하며, 600회의 실제 로봇 평가를 통해 방법의 효과성을 입증했다. 오픈 커뮤니티 플랫폼으로서 로봇 정책 벤치마킹 생태계에 상당한 기여를 할 수 있는 획기적인 연구이다.