Essence
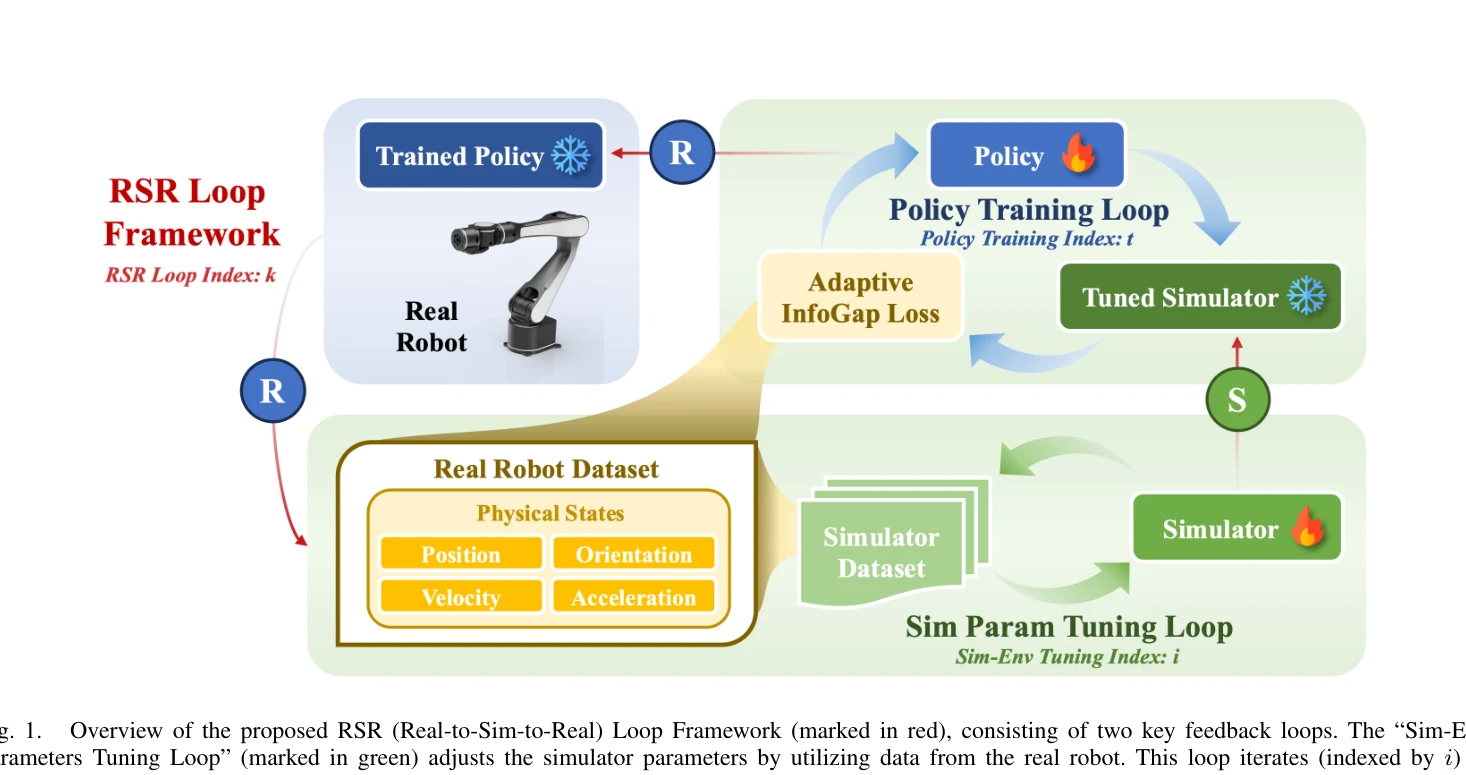
Fig. 1.
본 논문은 Real-Sim-Real (RSR) 루프 프레임워크를 제안하여 differentiable simulation을 활용해 시뮬레이션 파라미터를 반복적으로 개선하고 실제 세계 조건과 정렬시킴으로써 sim-to-real 갭을 해소한다. 정보 이론 기반의 비용 함수를 통해 다양하고 대표적인 실세계 데이터 수집을 유도하여 시뮬레이션 정제의 효율성을 극대화한다.
저자: Lu Shi, Yuxuan Xu, Shiyu Wang, Jinhao Huang, Wenhao Zhao, Yufei Jia, Zike Yan, Weibin Gu, Guyue Zhou | 날짜: 2025-03-13 | URL: https://arxiv.org/abs/2503.10118 📄 PDF
Fig. 1.
본 논문은 Real-Sim-Real (RSR) 루프 프레임워크를 제안하여 differentiable simulation을 활용해 시뮬레이션 파라미터를 반복적으로 개선하고 실제 세계 조건과 정렬시킴으로써 sim-to-real 갭을 해소한다. 정보 이론 기반의 비용 함수를 통해 다양하고 대표적인 실세계 데이터 수집을 유도하여 시뮬레이션 정제의 효율성을 극대화한다.
Fig. 1.
총평: 본 논문은 information theory 기반의 informative cost function을 통해 sim-to-real 전이 문제를 체계적으로 해결하는 새로운 RSR 루프 프레임워크를 제시하며, differentiable simulation과 기존 RL 알고리즘의 통합으로 실무 적용 가능성이 높다. 다만 실세계 실험의 범위 확대와 계산 비용 분석이 추후 과제이다.