Essence
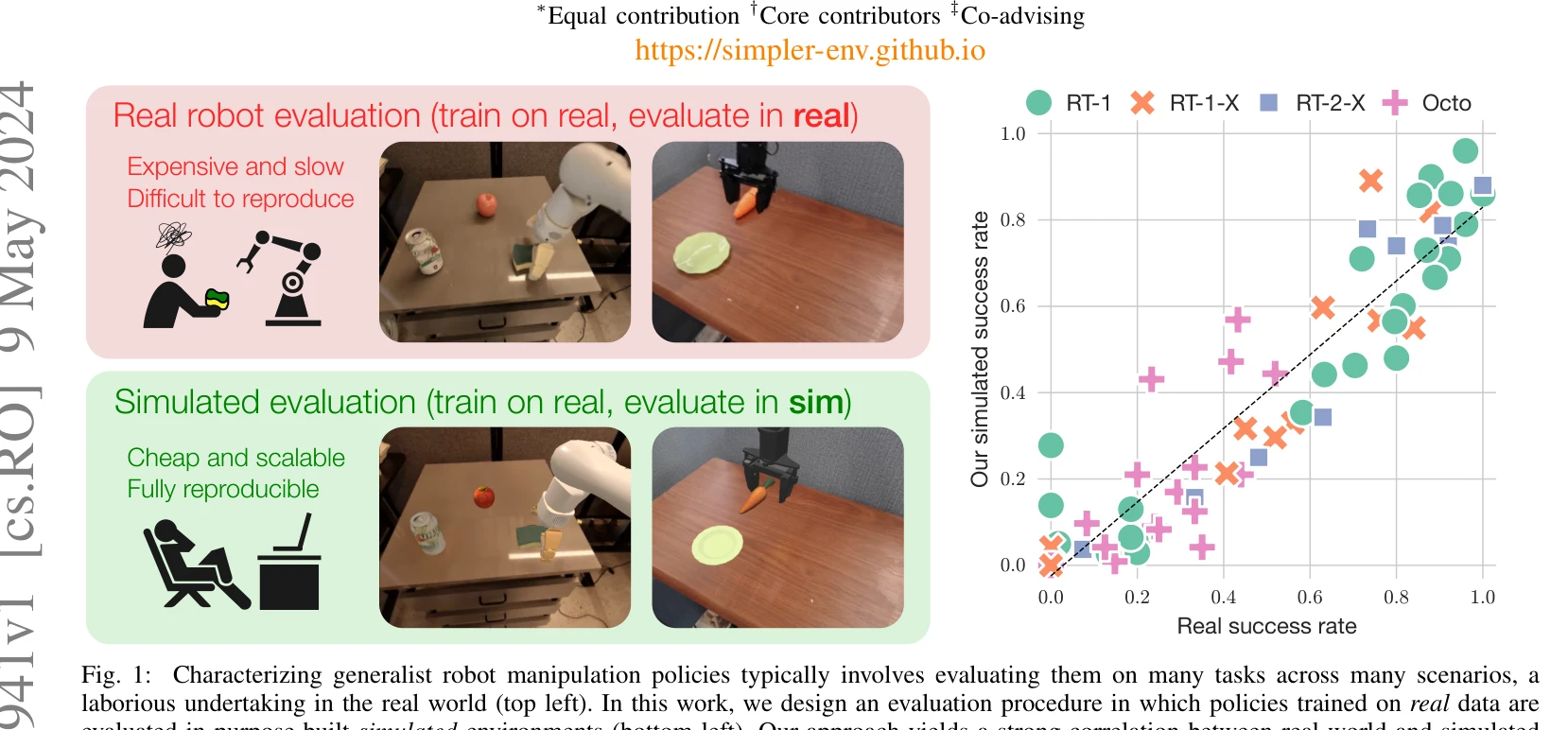
Fig. 1:
실제 로봇 데이터로 훈련한 조작 정책을 시뮬레이션 환경에서 평가하기 위해 SIMPLER라는 시뮬레이션 환경 모음을 제안하고, 제어 및 시각적 차이를 완화하여 실제 성능과 높은 상관관계를 달성한다.
저자: Xuanlin Li, Kyle Hsu, Jiayuan Gu, Karl Pertsch, Oier Mees, Homer Rich Walke, Chuyuan Fu, Ishikaa Lunawat, Isabel Sieh, Sean Kirmani, Sergey Levine, Jiajun Wu, Chelsea Finn, Hao Su, Quan Vuong, Ted Xiao | 날짜: 2024-05-09 | URL: https://arxiv.org/abs/2405.05941 📄 PDF
Fig. 1:
실제 로봇 데이터로 훈련한 조작 정책을 시뮬레이션 환경에서 평가하기 위해 SIMPLER라는 시뮬레이션 환경 모음을 제안하고, 제어 및 시각적 차이를 완화하여 실제 성능과 높은 상관관계를 달성한다.
Fig. 1:
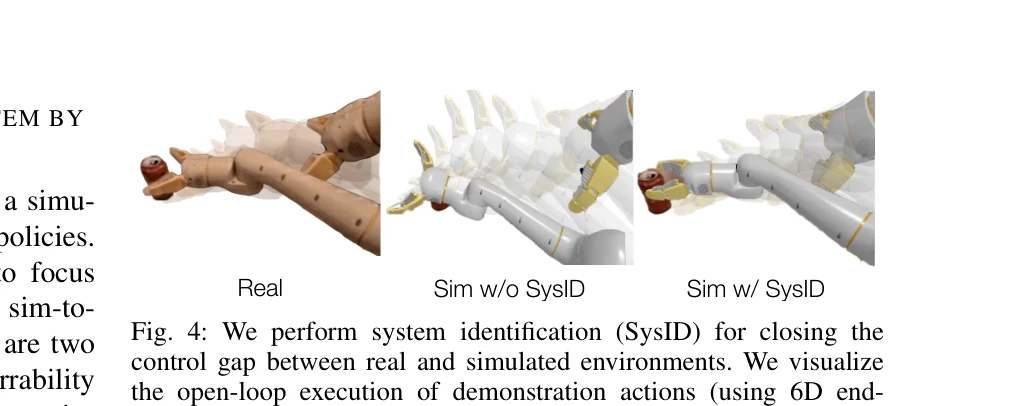
Fig. 4: We perform system identification (SysID) for closing the
총평: 로봇 조작 정책 평가의 확장성과 재현성 문제를 실질적으로 해결하는 중요한 기여이며, 체계적인 실험과 오픈소스 공개를 통해 커뮤니티에 즉시 영향을 미칠 수 있는 실용적인 프레임워크를 제시한다.