Essence
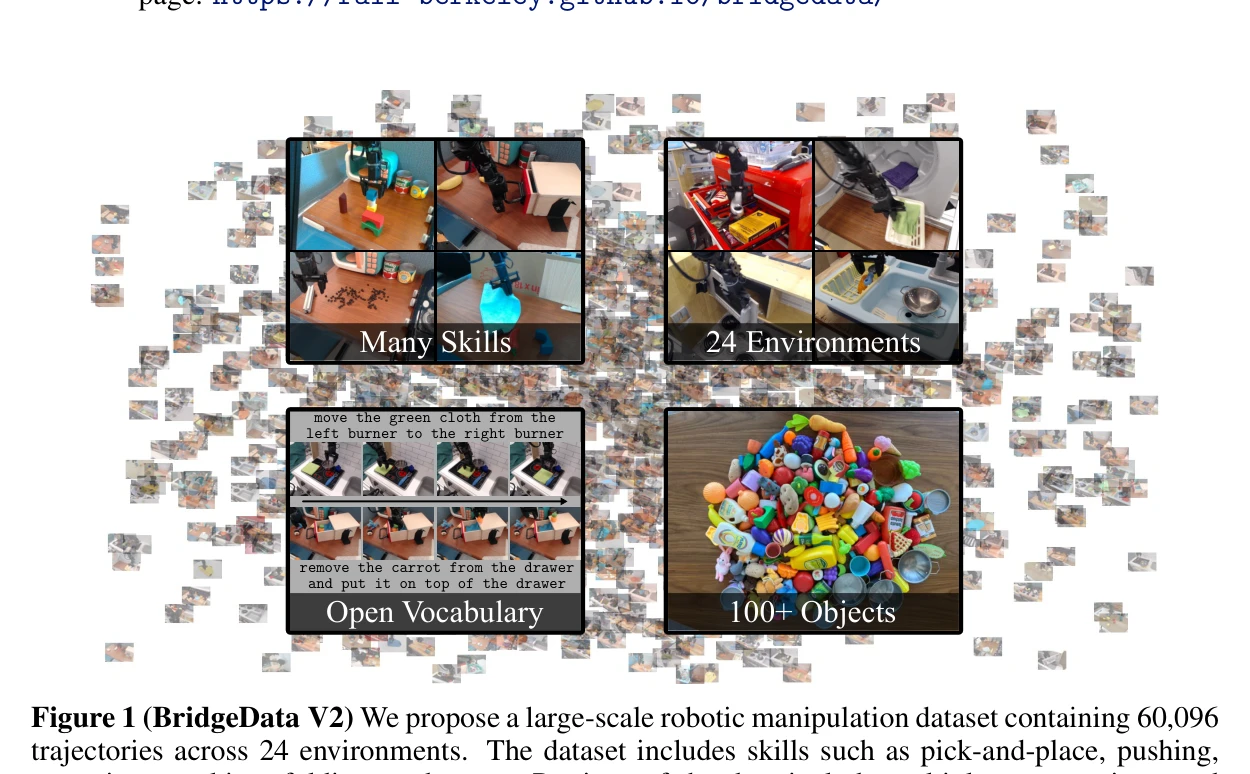
Figure 1 (BridgeData V2) We propose a large-scale robotic manipulation dataset containing 60,096
저비용 공개 로봇으로 24개 환경에서 수집한 60,096개 궤적으로 이루어진 대규모 로봇 조작 데이터셋 BridgeData V2를 제안하며, 다양한 imitation learning 및 offline RL 방법들과의 호환성을 검증한다.
저자: Homer Walke, Kevin Black, Abraham Lee, Moo Jin Kim, Max Du, Chongyi Zheng, Tony Zhao, Philippe Hansen-Estruch, Quan Vuong, Andre He, Vivek Myers, Kuan Fang, Chelsea Finn, Sergey Levine | 날짜: 2023-08-24 | URL: https://arxiv.org/abs/2308.12952 📄 PDF
Figure 1 (BridgeData V2) We propose a large-scale robotic manipulation dataset containing 60,096
저비용 공개 로봇으로 24개 환경에서 수집한 60,096개 궤적으로 이루어진 대규모 로봇 조작 데이터셋 BridgeData V2를 제안하며, 다양한 imitation learning 및 offline RL 방법들과의 호환성을 검증한다.
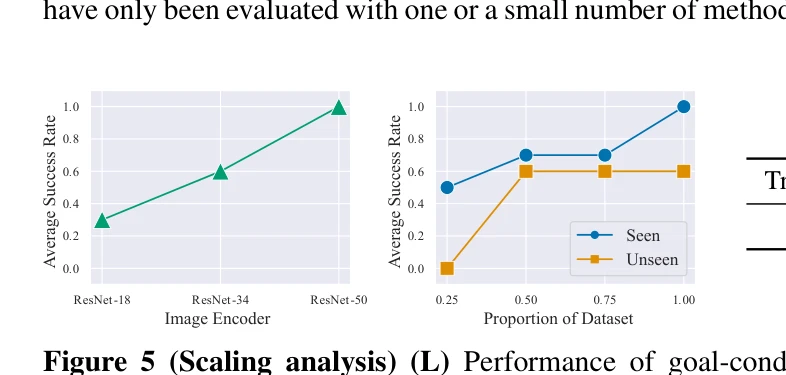
Figure 5 (Scaling analysis) (L) Performance of goal-conditioned behavior cloning trained on
총평: BridgeData V2는 기존 로봇 데이터셋의 한계를 해결하는 대규모 다양한 벤치마크로서, 공개 저비용 로봇과 다양한 환경·기술·조건화 방식을 통해 범용성과 재현 가능성을 모두 확보하였다. 6가지 방법론에 대한 포괄적 평가와 스케일링 분석은 로봇 학습 연구의 데이터-중심 접근법의 중요성을 강하게 입증하며, 공개 자원으로서 학계에 상당한 기여를 할 것으로 판단된다.