저자: Hu Yue, Siyuan Huang, Yue Liao, Shengcong Chen, Pengfei Zhou, Liliang Chen, Maoqing Yao, Guanghui Ren | 날짜: 2025-05-14 | URL: https://arxiv.org/abs/2505.09694 📄 PDF
Essence
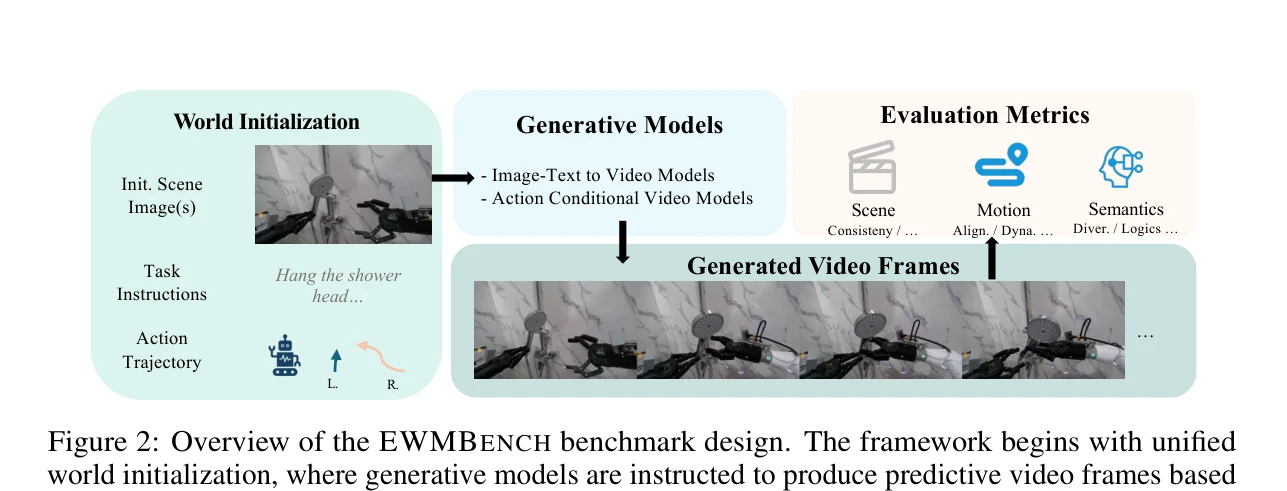
Figure 2: Overview of the EWMBENCH benchmark design. The framework begins with unified
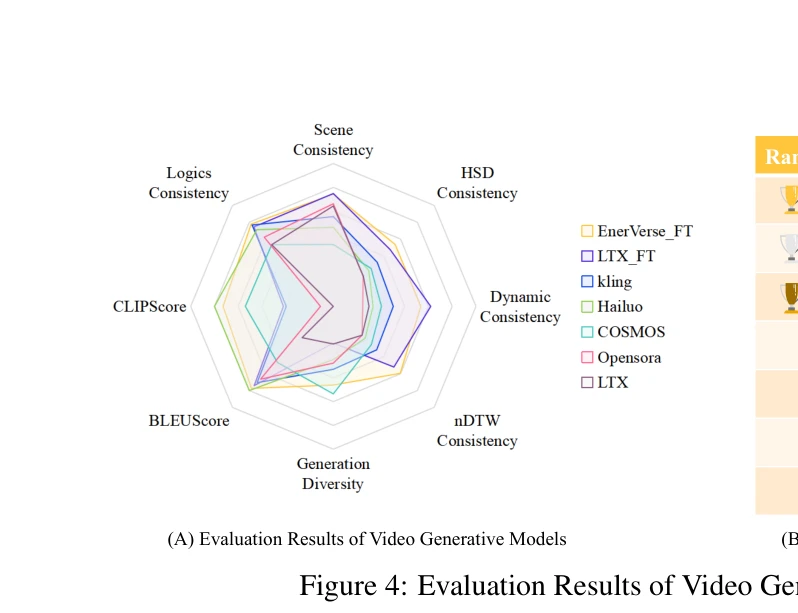
본 논문은 Embodied World Models (EWMs)의 성능을 평가하기 위한 전문 벤치마크인 EWMBench를 제안하며, 시각적 장면 일관성, 동작 정확성, 의미론적 정렬이라는 세 가지 핵심 측면을 기반으로 로보틱 조작 작업에서의 물리적 타당성과 행동 일관성을 평가한다.
Evaluation
Novelty: 4/5 Technical Soundness: 3/5 Significance: 4/5 Clarity: 4/5 Overall: 4/5
총평: 본 논문은 embodied AI 분야에서 그간 간과된 EWM 평가의 중요한 갭을 채우는 체계적이고 포괄적인 벤치마크를 제시하며, 실제 로봇 데이터 기반 데이터셋과 다차원 평가 메트릭을 통해 향후 embodied world model 개발에 실질적인 기여를 할 것으로 예상된다.