Essence
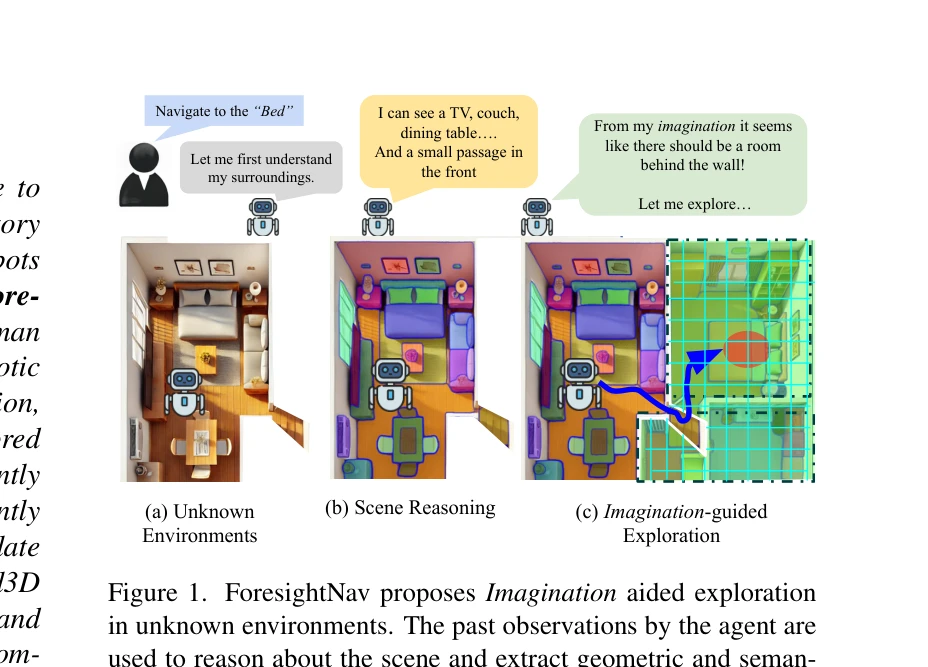
Figure 1. ForesightNav proposes Imagination aided exploration
ForesightNav는 로봇이 인간처럼 상상력을 활용하여 미탐사 지역의 점유 및 의미정보를 예측하고, 이를 기반으로 효율적인 장기 네비게이션 목표를 선택하는 탐색 전략을 제안한다.
저자: Hardik Shah, Jiaxu Xing, Nico Messikommer, Boyang Sun, Marc Pollefeys, Davide Scaramuzza | 날짜: 2025-04-22 | URL: https://arxiv.org/abs/2504.16062 📄 PDF
Figure 1. ForesightNav proposes Imagination aided exploration
ForesightNav는 로봇이 인간처럼 상상력을 활용하여 미탐사 지역의 점유 및 의미정보를 예측하고, 이를 기반으로 효율적인 장기 네비게이션 목표를 선택하는 탐색 전략을 제안한다.
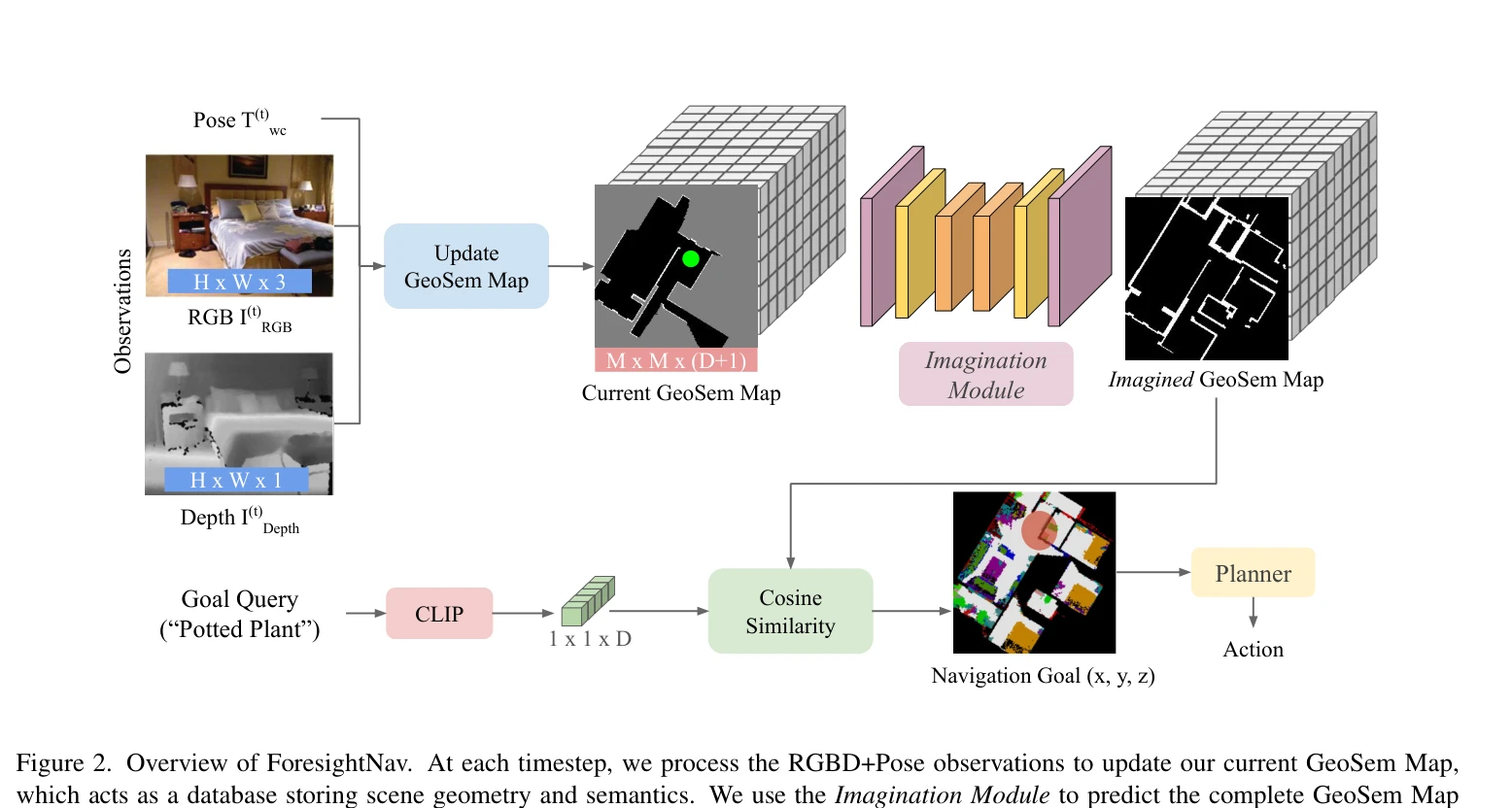
Figure 2. Overview of ForesightNav. At each timestep, we process the RGBD+Pose observations to update our current GeoSem
Figure 2. Overview of ForesightNav. At each timestep, we process the RGBD+Pose observations to update our current GeoSem
총평: ForesightNav는 인간의 상상력 메커니즘을 로봇 탐색에 통합하는 개념적으로 신선한 접근으로, 실험 결과 탐색 효율성 개선을 보여주나 실제 로봇 환경 검증이 필요하다.