Essence
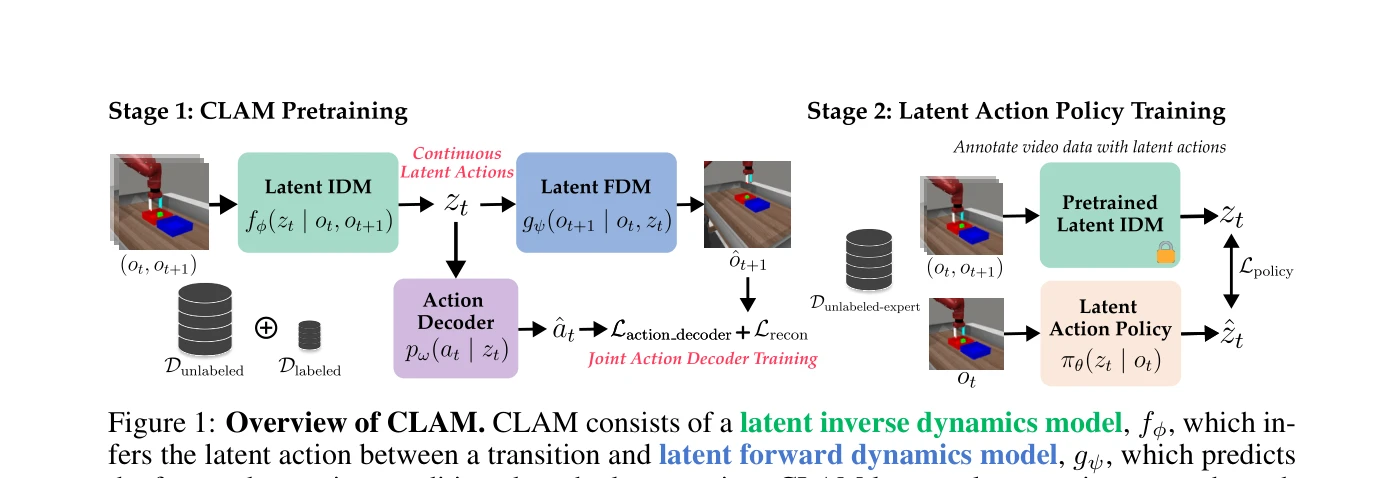
Figure 1: Overview of CLAM. CLAM consists of a latent inverse dynamics model, fϕ, which in-
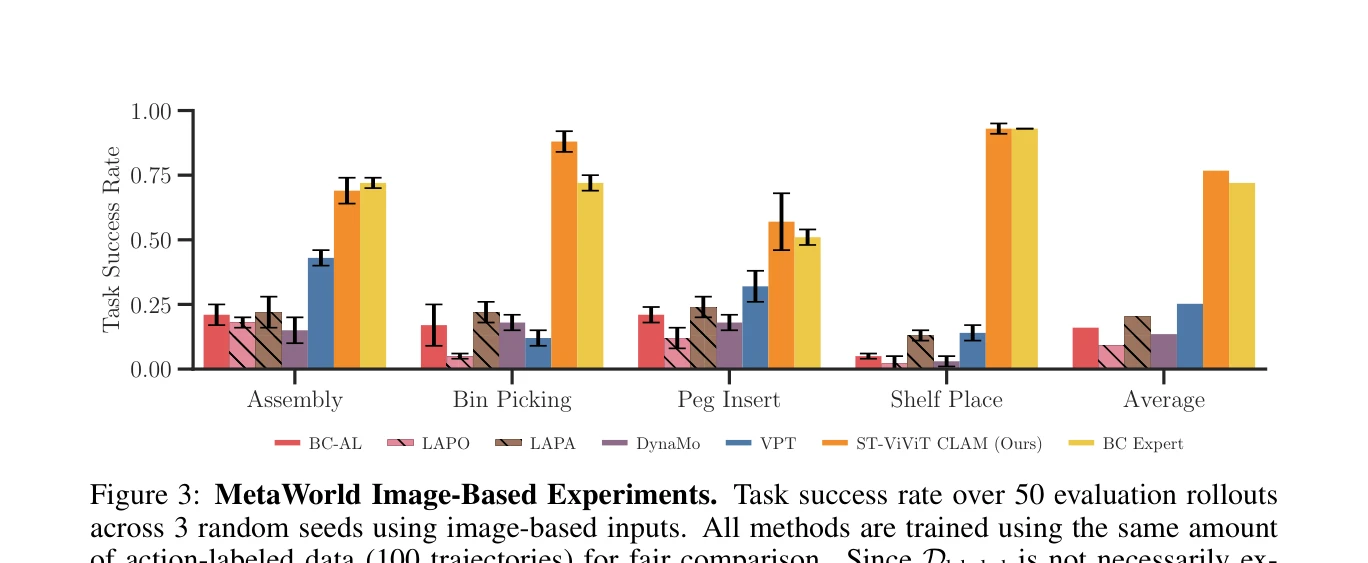
CLAM은 라벨이 없는 관찰 데이터로부터 로봇 정책을 학습하기 위해 continuous latent action space를 사용하며, action decoder를 jointly training하여 실제 환경 액션으로의 grounding을 보장하는 방법을 제안한다.
Evaluation
Novelty: 4/5 Technical Soundness: 4/5 Significance: 4/5 Clarity: 4/5 Overall: 4/5
총평: CLAM은 continuous latent action space와 joint decoder training이라는 명확한 기술적 혁신으로 unlabeled 데이터 기반 로봇 정책 학습의 실질적 성능을 획기적으로 향상시키며, 비용이 많이 드는 expert 데이터 수집의 필요성을 크게 감소시키는 highly significant contribution을 제시한다.