Essence
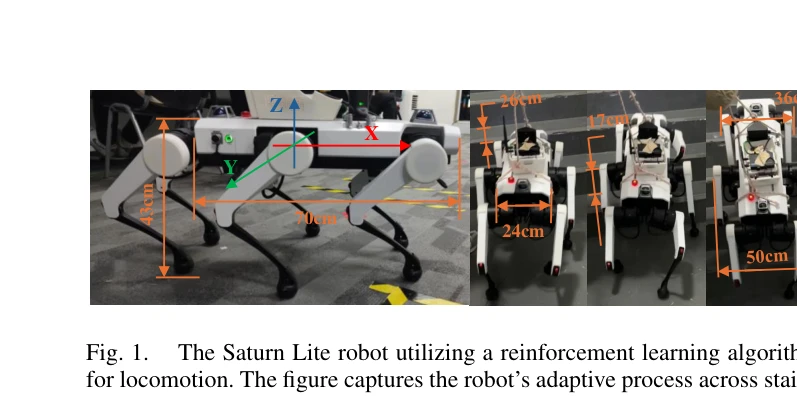
Fig. 1.
정적 마찰이 로봇 강화학습의 Sim2Real 성능에 미치는 영향을 체계적으로 분석하고, Static friction-aware domain randomization을 제안하여 복잡한 지형에서의 로봇 적응 능력을 향상시킨다.
저자: Xiaoyi Hu, Qiao Sun, Bailin He, Haojie Liu, Xueyi Zhang, Chunpeng lu, Jiangwei Zhong | 날짜: 2025-03-03 | URL: https://arxiv.org/abs/2503.01255 📄 PDF
Fig. 1.
정적 마찰이 로봇 강화학습의 Sim2Real 성능에 미치는 영향을 체계적으로 분석하고, Static friction-aware domain randomization을 제안하여 복잡한 지형에서의 로봇 적응 능력을 향상시킨다.
Fig. 1.
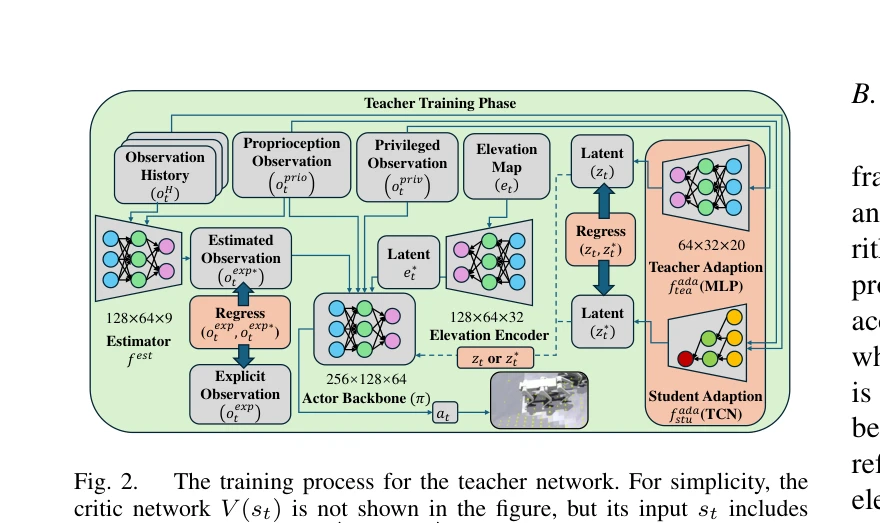
Fig. 2.
총평: 본 논문은 로봇 강화학습의 Sim2Real 갭에서 그간 간과되었던 static friction의 중요성을 체계적으로 규명하고 실제 로봇에서 효과를 입증한 의미 있는 연구이다. 제어 이론과 강화학습의 통합 접근과 실무 중심의 검증이 강점이나, 다양한 로봇 플랫폼으로의 일반화는 향후 과제이다.