Achievement
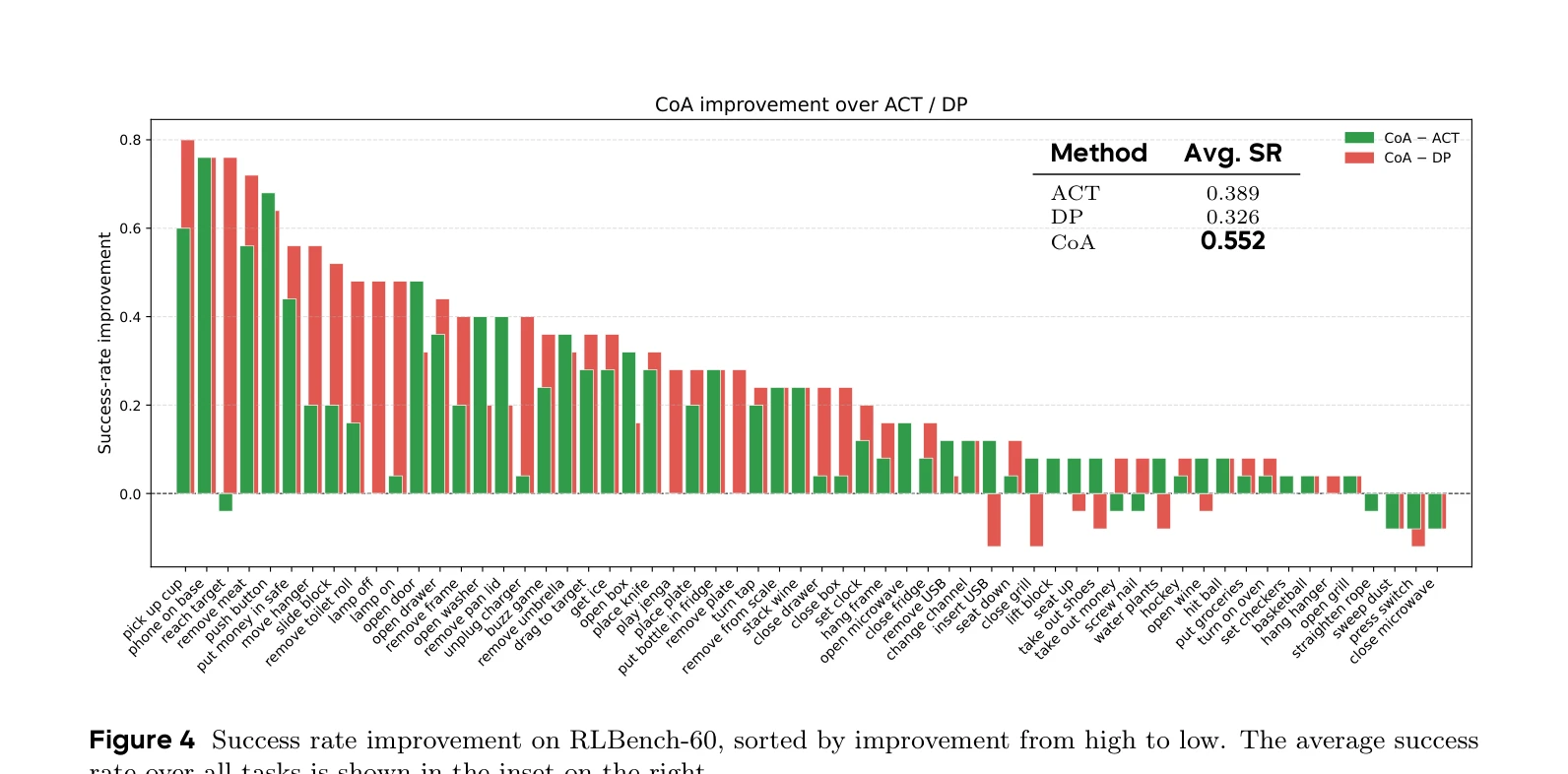
Figure 4 Success rate improvement on RLBench-60, sorted by improvement from high to low. The average success
- RLBench 벤치마크 성능: 60개 작업에서 ACT 대비 16%, Diffusion Policy 대비 23% 성능 향상 달성
- 실제 로봇 조작: 8가지 실제 조작 작업에서 ACT를 15% 초과 성능
- 공간 일반화: keyframe-기반 역순 생성이 분포 외 조건에서 강한 일반화 능력 제시
- 구조적 단순성: ACT와 유사한 아키텍처를 사용하면서도 패러다임 변화만으로 성능 향상을 달성하여 접근법의 우수성 입증