Essence
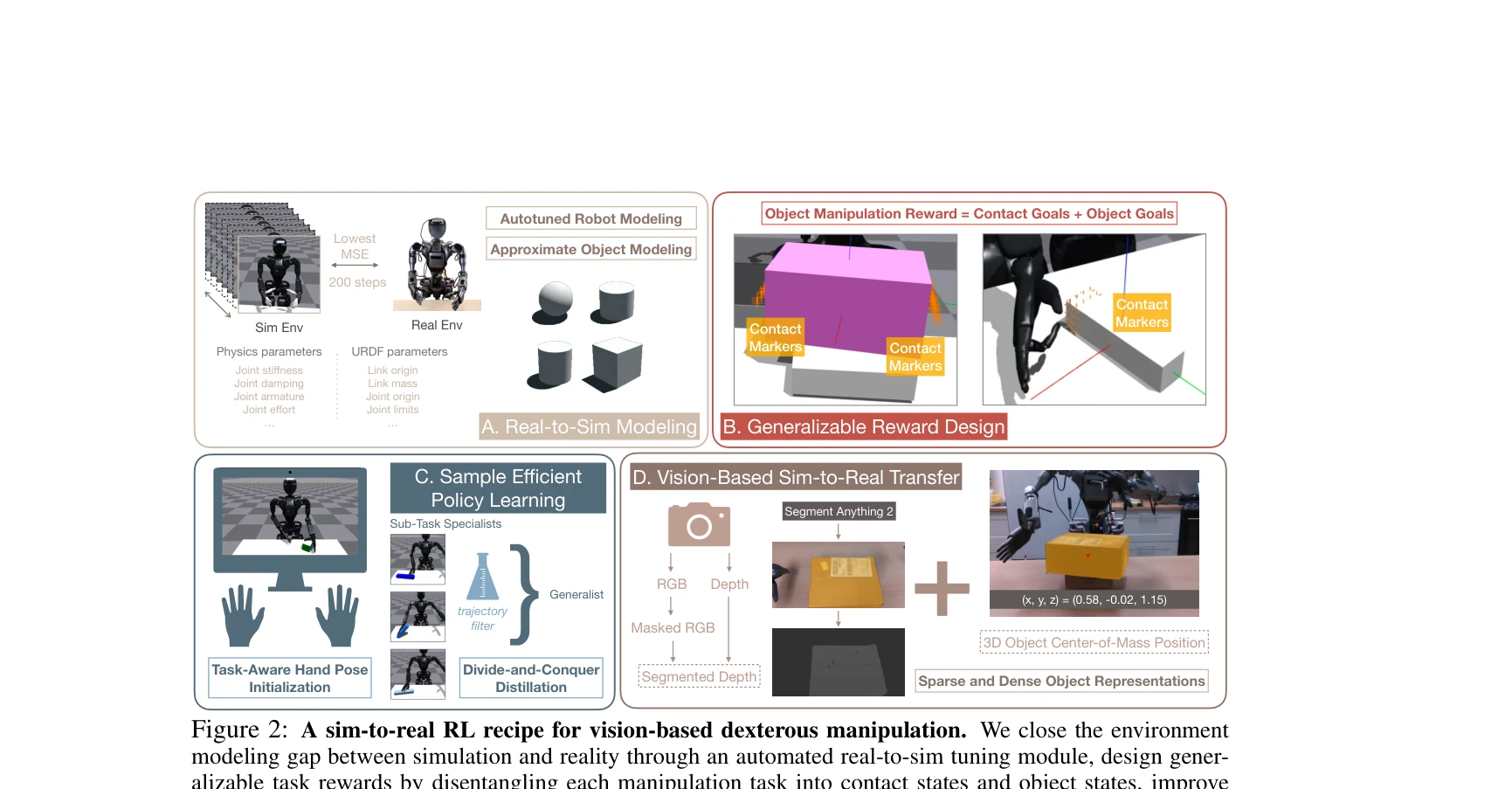
Figure 2: A sim-to-real RL recipe for vision-based dexterous manipulation. We close the environment
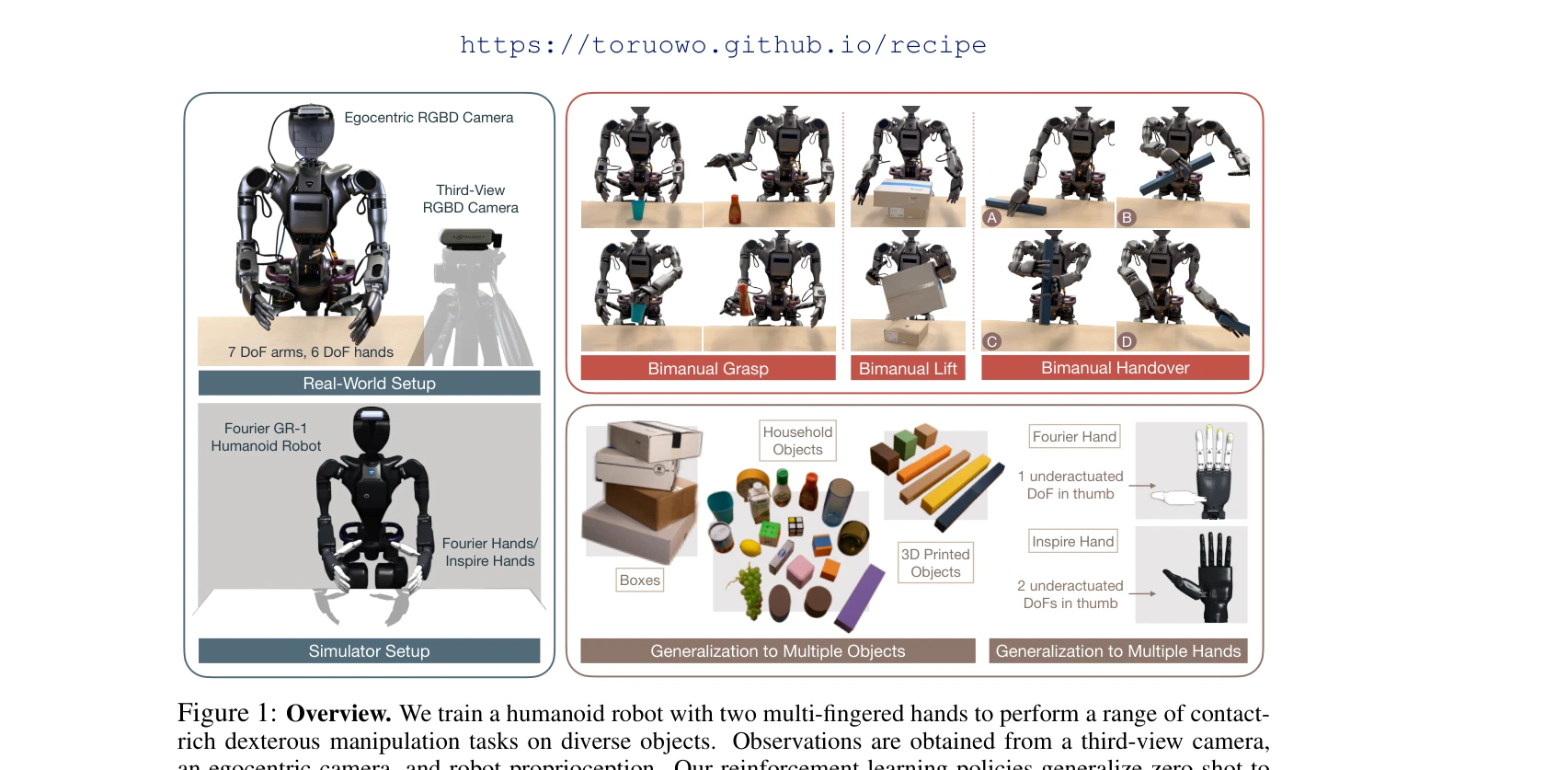
본 논문은 휴머노이드 로봇의 다중 손가락 손을 이용한 시각 기반 정교한 조작을 위해 sim-to-real RL을 적용하는 실용적인 레시피를 제시하며, 자동화된 실-시뮬레이션 튜닝, 일반화된 보상 설계, 분할-정복 정책 증류, 하이브리드 객체 표현을 통합한다.
Evaluation
Novelty: 4/5 Technical Soundness: 3/5 Significance: 4/5 Clarity: 4/5 Overall: 4/5
총평: 본 논문은 sim-to-real RL을 실제 휴머노이드 다중 손가락 조작으로 처음 확장하는 실용적이고 포괄적인 솔루션을 제시하며, 자동화된 시스템 식별과 정책 증류 등 여러 혁신을 통해 높은 성공률과 일반화 능력을 입증한다. 다만 미본 객체 성능과 방법의 복잡성 개선에는 여지가 있다.