저자: Octo Model Team, Dibya Ghosh, Homer Walke, Karl Pertsch, Kevin Black, Oier Mees, Sudeep Dasari, Joey Hejna, Tobias Kreiman, Charles Xu, Jianlan Luo, You Liang Tan, Lawrence Yunliang Chen, Pannag Sanketi, Quan Vuong, Ted Xiao, Dorsa Sadigh, Chelsea Finn, Sergey Levine | 날짜: 2024-05-20 | URL: https://arxiv.org/abs/2405.12213 📄 PDF
Essence
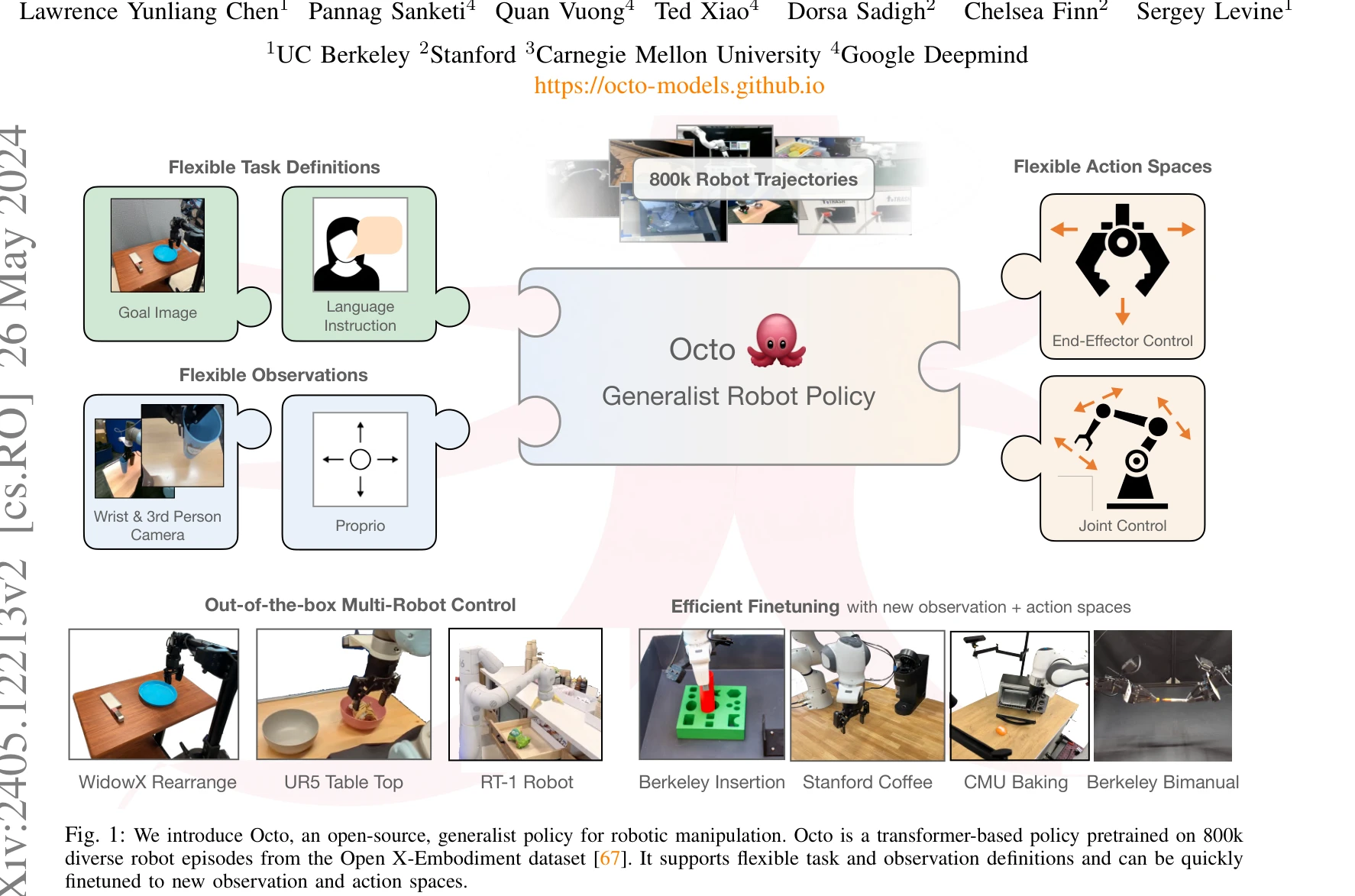
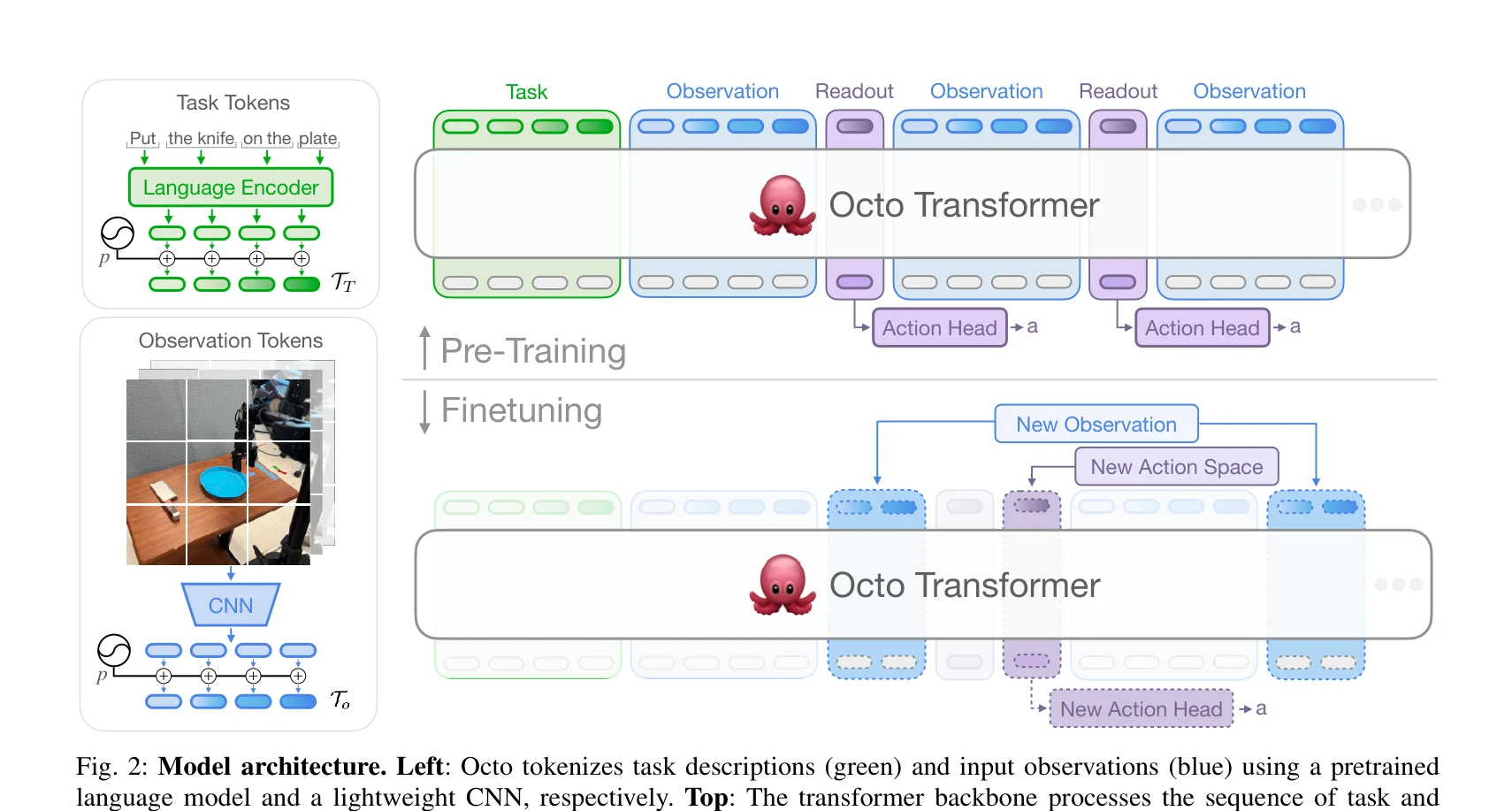
Fig. 1: We introduce Octo, an open-source, generalist policy for robotic manipulation. Octo is a transformer-based polic
Open X-Embodiment 데이터셋의 800k 궤적으로 사전학습된 transformer 기반의 generalist robot policy인 Octo를 제안하며, 언어 명령이나 목표 이미지로 지시 가능하고 새로운 센서와 액션 공간으로 효율적으로 미세조정 가능하다.
Evaluation
Novelty: 4/5 Technical Soundness: 3/5 Significance: 4/5 Clarity: 4/5 Overall: 4/5
총평: Octo는 대규모 다양한 데이터와 유연한 아키텍처로 generalist robot policy의 실질적 발전을 이루었으며, 완전 공개를 통해 로봇 커뮤니티에 즉시적 기여를 제공한다. 미세조정 효율성과 다중 플랫폼 호환성은 실제 응용성을 크게 높인다.