Essence
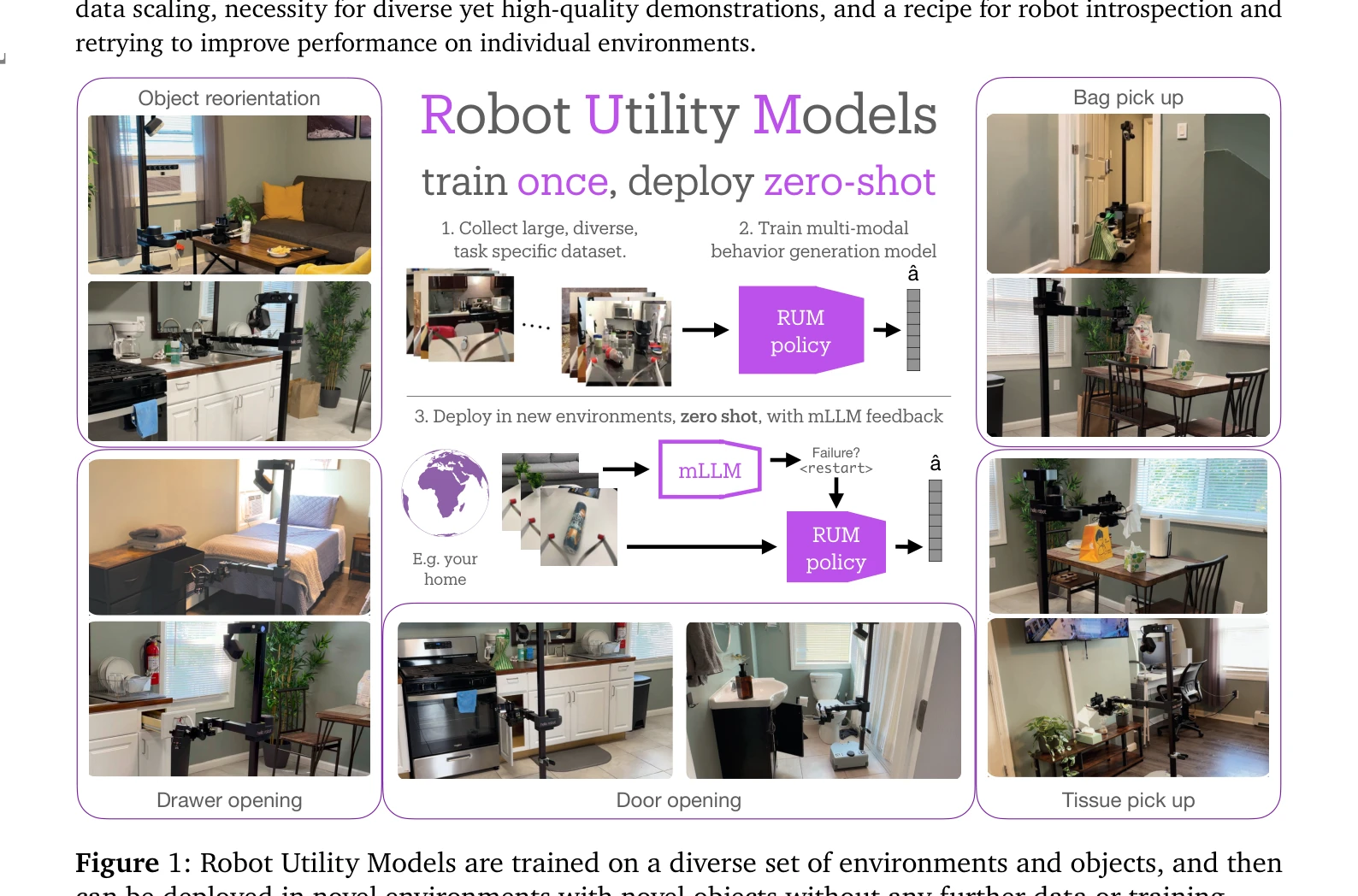
Figure 1: Robot Utility Models are trained on a diverse set of environments and objects, and then
Robot Utility Models (RUM)은 다양한 환경에서 수집한 대규모 데이터로 학습하여 새로운 환경에서 파인튜닝 없이 즉시 배포 가능한 로봇 정책 프레임워크이다. 90% 성공률로 미지의 환경과 객체에 대해 zero-shot 일반화를 달성한다.
저자: Haritheja Etukuru, Norihito Naka, Zijin Hu, Seungjae Lee, Julian Mehu, Aaron Edsinger, Chris Paxton, Soumith Chintala, Lerrel Pinto, Nur Muhammad Mahi Shafiullah | 날짜: 2024-09-09 | URL: https://arxiv.org/abs/2409.05865 📄 PDF
Figure 1: Robot Utility Models are trained on a diverse set of environments and objects, and then
Robot Utility Models (RUM)은 다양한 환경에서 수집한 대규모 데이터로 학습하여 새로운 환경에서 파인튜닝 없이 즉시 배포 가능한 로봇 정책 프레임워크이다. 90% 성공률로 미지의 환경과 객체에 대해 zero-shot 일반화를 달성한다.
Figure 1: Robot Utility Models are trained on a diverse set of environments and objects, and then
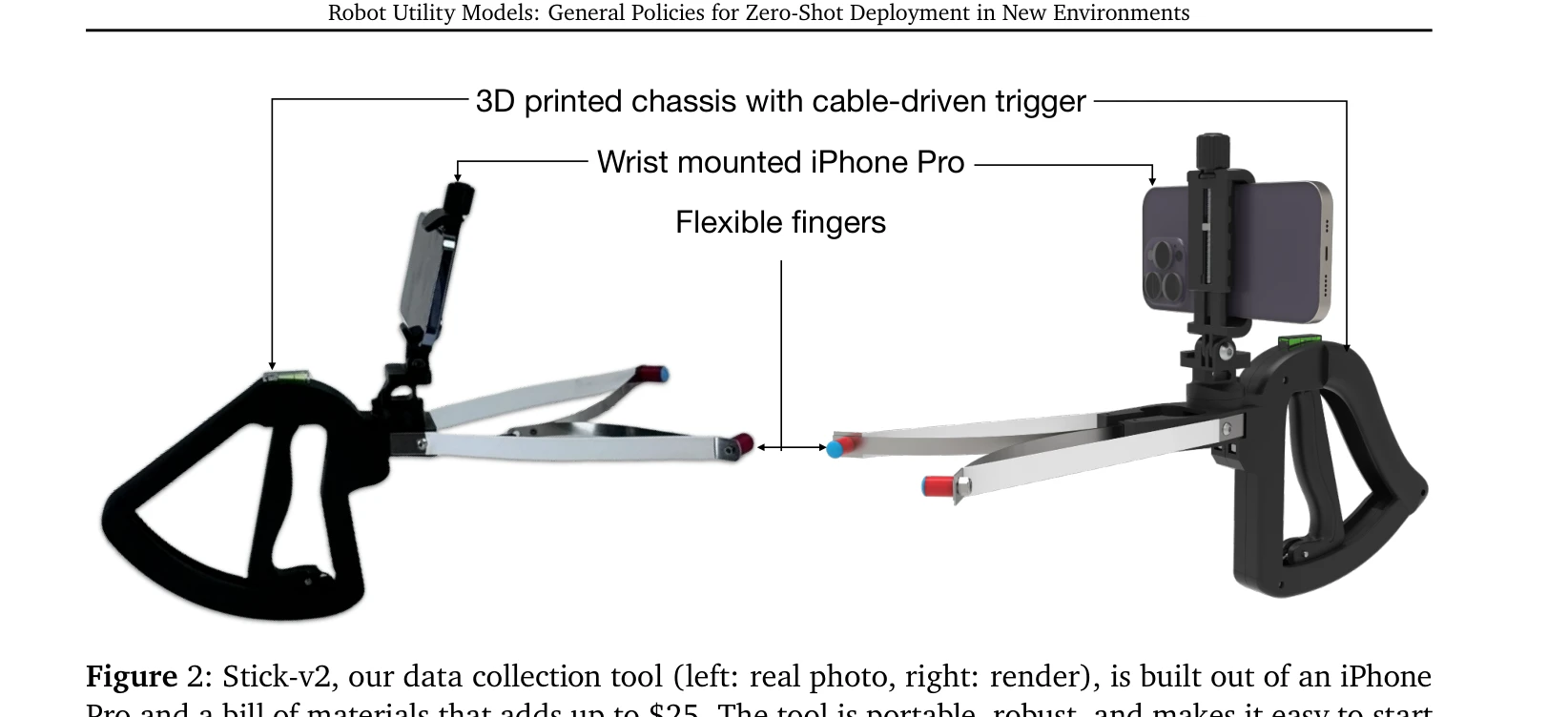
Figure 2: Stick-v2, our data collection tool (left: real photo, right: render), is built out of an iPhone
총평: 본 논문은 로봇 정책의 zero-shot 일반화라는 중요한 문제를 체계적인 엔지니어링 접근으로 해결하며, 실용적인 데이터 수집 도구, 효과적인 학습 및 배포 파이프라인, 혁신적인 mLLM 기반 실패 복구 메커니즘을 제시한다. 2,950회의 실제 로봇 롤아웃과 오픈소싱된 리소스를 통해 강력한 실증적 기여를 이루었으나, 다양한 작업/로봇 플랫폼으로의 확장성과 상세한 실패 분석이 향후 과제로 남아있다.