저자: Kun Wu, Chengkai Hou, Jiaming Liu, Zhengping Che, Xiaozhu Ju, Zhuqin Yang, Meng Li, Yinuo Zhao, Zhiyuan Xu, Guang Yang, Shichao Fan, Xinhua Wang, Fei Liao, Zhen Zhao, Guangyu Li, Zhao Jin, Lecheng Wang, Jilei Mao, Ning Liu, Pei Ren, Qiang Zhang, Yaoxu Lyu, Mengzhen Liu, Jingyang He, Yulin Luo, Zeyu Gao, Chenxuan Li, Chenyang Gu, Yankai Fu, Di Wu, Xingyu Wang, Sixiang Chen, Zhenyu Wang, Pengju An, Siyuan Qian, Shanghang Zhang, Jian Tang | 날짜: 2024-12-18 | URL: https://arxiv.org/abs/2412.13877 📄 PDF
Essence
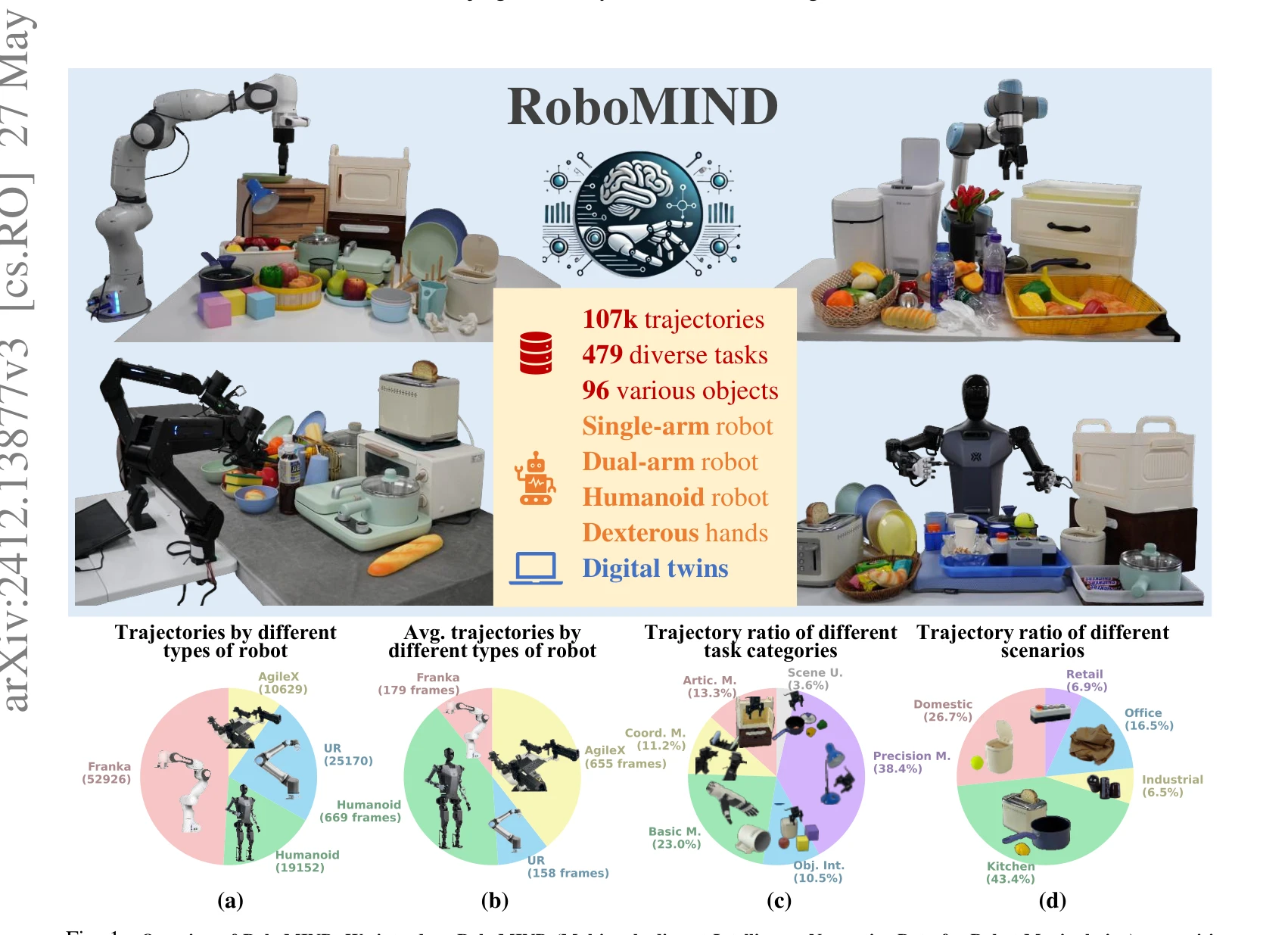
Fig. 1: Overview of RoboMIND. We introduce RoboMIND (Multi-embodiment Intelligence Normative Data for Robot Manipulation
RoboMIND는 4종류의 로봇 embodiment을 통해 수집된 107k개의 demonstration trajectory로 구성된 대규모 통합 로봇 조작 데이터셋으로, 통일된 데이터 수집 표준과 5k개의 failure case를 포함한다.
Evaluation
Novelty: 4/5 Technical Soundness: 3/5 Significance: 4/5 Clarity: 4/5 Overall: 4/5
총평: RoboMIND는 통일된 수집 표준으로 구축된 최대 규모의 멀티 embodiment 로봇 데이터셋으로서, failure case 주석과 digital twin 환경을 포함하여 일반화 가능한 로봇 조작 정책 학습을 위한 중요한 자원을 제공한다. 데이터셋의 규모, 다양성, 고품질성에서 기존 연구들을 크게 능가하며 후속 로봇 학습 연구에 상당한 영향을 미칠 것으로 예상된다.