Essence
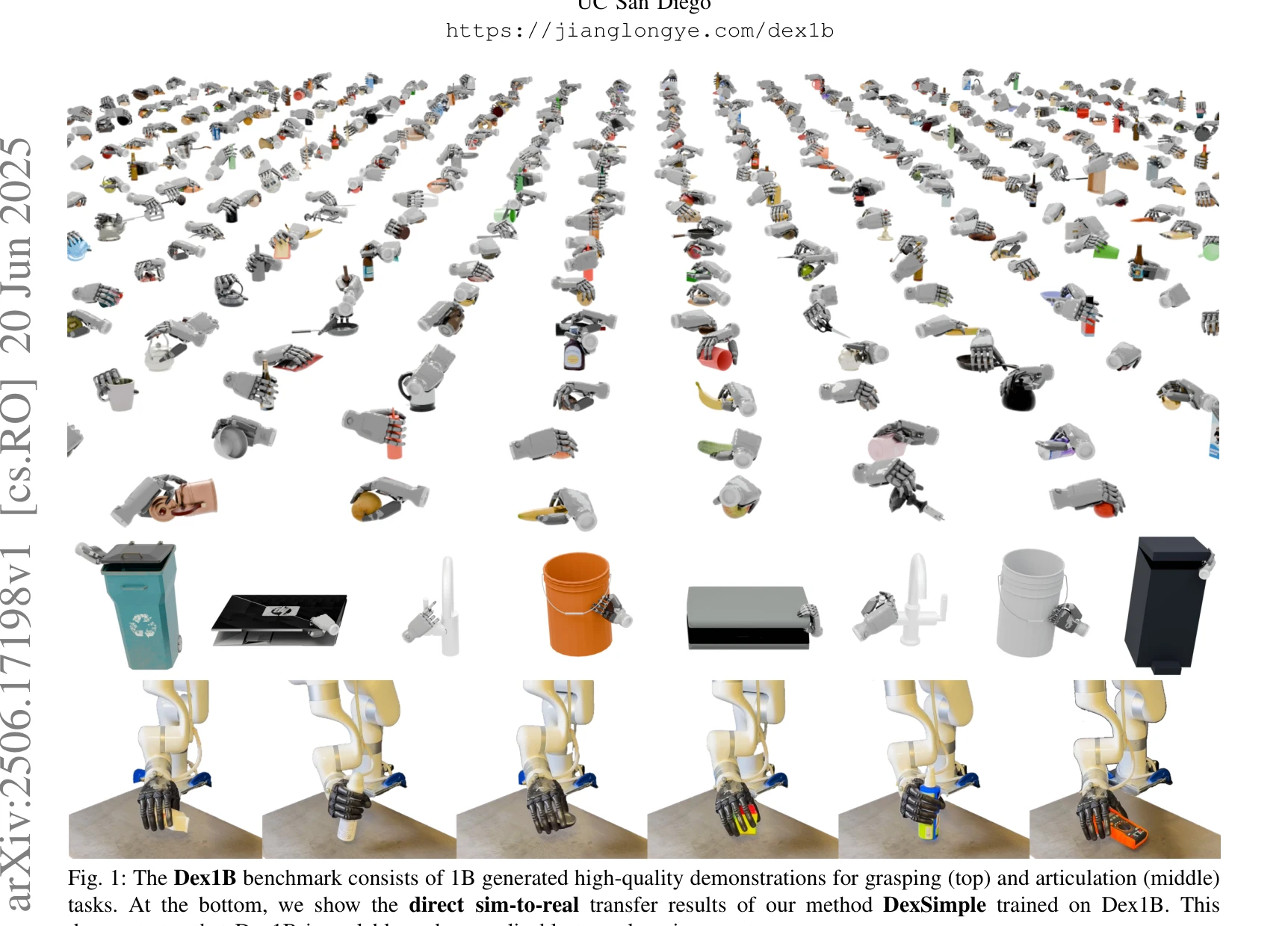
Fig. 1: The Dex1B benchmark consists of 1B generated high-quality demonstrations for grasping (top) and articulation (mi
생성 모델과 최적화 방법을 결합하여 10억 개의 고품질 손가락 조작 시연을 생성한 Dex1B 데이터셋과 이를 활용하는 DexSimple 방법을 제시하여 손가락 조작 작업의 성능을 22% 향상시켰다.
저자: Jianglong Ye, Keyi Wang, Chengjing Yuan, Ruihan Yang, Yiquan Li, Jiyue Zhu, Yuzhe Qin, Xueyan Zou, Xiaolong Wang | 날짜: 2025-06-20 | URL: https://arxiv.org/abs/2506.17198 📄 PDF
Fig. 1: The Dex1B benchmark consists of 1B generated high-quality demonstrations for grasping (top) and articulation (mi
생성 모델과 최적화 방법을 결합하여 10억 개의 고품질 손가락 조작 시연을 생성한 Dex1B 데이터셋과 이를 활용하는 DexSimple 방법을 제시하여 손가락 조작 작업의 성능을 22% 향상시켰다.
Fig. 1: The Dex1B benchmark consists of 1B generated high-quality demonstrations for grasping (top) and articulation (mi
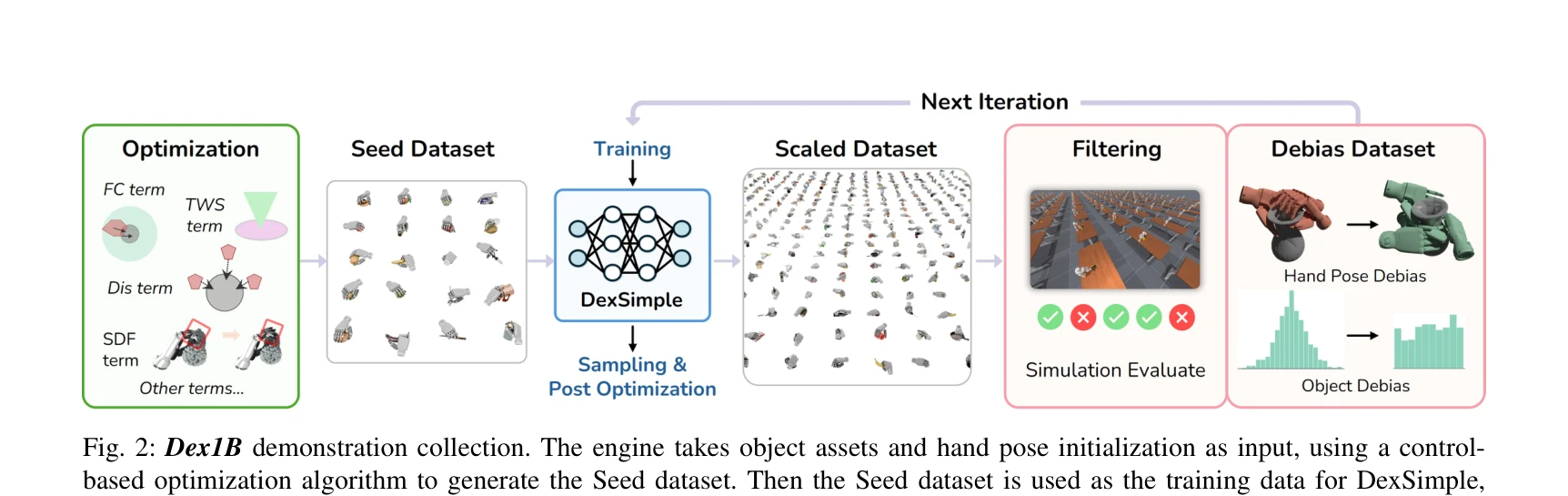
Fig. 2: Dex1B demonstration collection. The engine takes object assets and hand pose initialization as input, using a co
총평: 본 논문은 생성 모델과 최적화를 결합하여 10억 개의 대규모 손가락 조작 시연 데이터셋을 체계적으로 구성하고, 이를 활용한 간단하면서도 효과적한 학습 방법으로 최고 성능을 달성한 중요한 기여이다. 데이터셋의 규모, 다양성, 품질 측면에서 혁신적이며 실제 로봇 실험을 통한 검증도 충분하다.