Essence
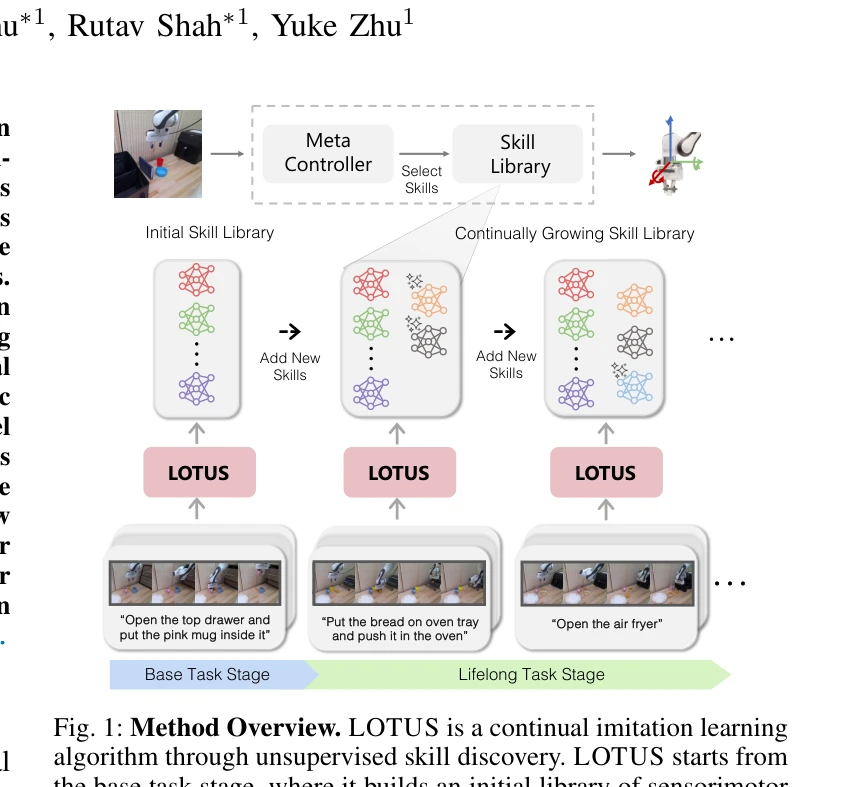
Fig. 1: Method Overview. LOTUS is a continual imitation learning
LOTUS는 물리 로봇이 인간 시연으로부터 계속 새로운 조작 과제를 학습하도록 하는 지속적 모방 학습 알고리즘으로, open-vocabulary vision model을 이용한 비지도 기술 발견과 메타-컨트롤러 기반의 기술 합성을 통해 시각 기반 조작을 수행한다.
저자: Weikang Wan, Yifeng Zhu, Rutav Shah, Yuke Zhu | 날짜: 2023-11-03 | URL: https://arxiv.org/abs/2311.02058 📄 PDF
Fig. 1: Method Overview. LOTUS is a continual imitation learning
LOTUS는 물리 로봇이 인간 시연으로부터 계속 새로운 조작 과제를 학습하도록 하는 지속적 모방 학습 알고리즘으로, open-vocabulary vision model을 이용한 비지도 기술 발견과 메타-컨트롤러 기반의 기술 합성을 통해 시각 기반 조작을 수행한다.
Fig. 1: Method Overview. LOTUS is a continual imitation learning
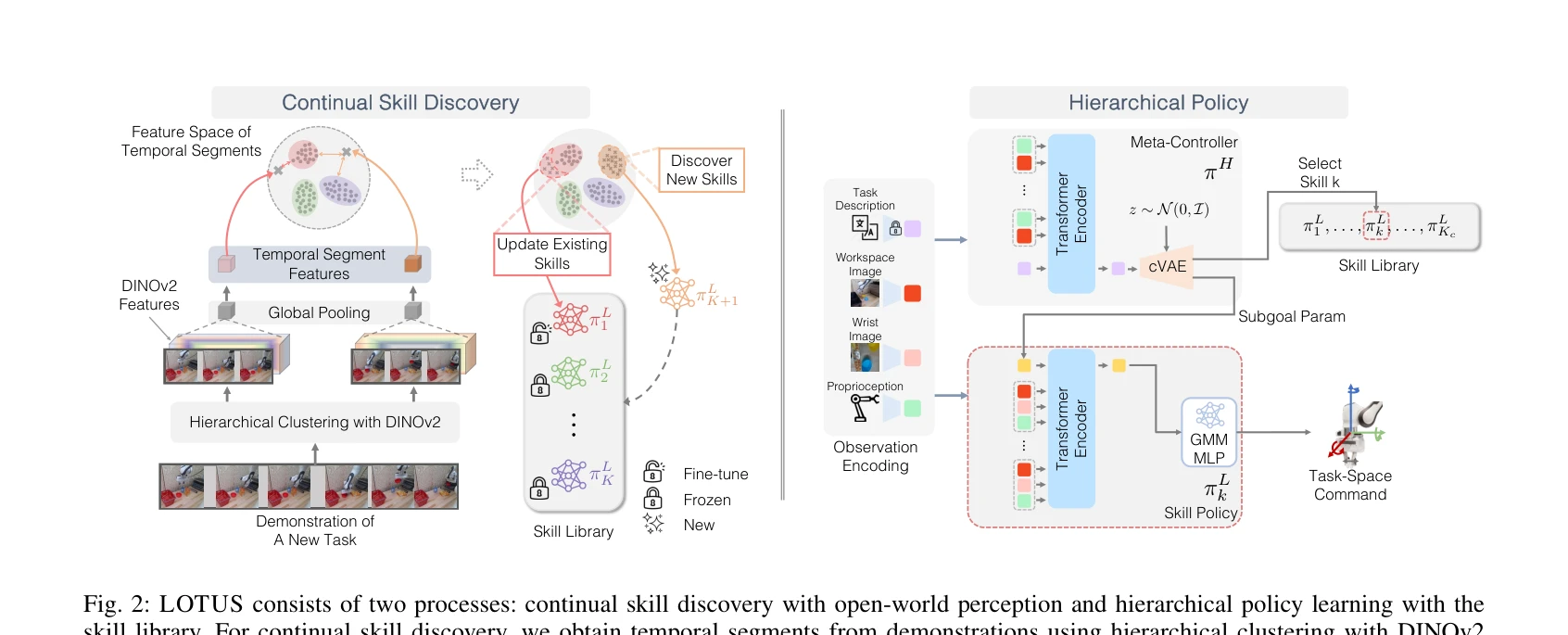
Fig. 2: LOTUS consists of two processes: continual skill discovery with open-world perception and hierarchical policy le
총평: LOTUS는 지속적 모방학습에서 동적 기술 발견과 계층적 합성을 통해 실제 로봇이 효율적으로 평생 학습할 수 있도록 하는 혁신적 접근법으로, 견고한 실험 검증과 11% 이상의 성능 향상을 통해 그 효과성을 입증한다.