저자: Physical Intelligence, Kevin Black, Noah Brown, James Darpinian, Karan Dhabalia, Danny Driess, Adnan Esmail, Michael Equi, Chelsea Finn, Niccolo Fusai, Manuel Y. Galliker, Dibya Ghosh, Lachy Groom, Karol Hausman, Brian Ichter, Szymon Jakubczak, Tim Jones, Liyiming Ke, Devin LeBlanc, Sergey Levine, Adrian Li-Bell, Mohith Mothukuri, Suraj Nair, Karl Pertsch, Allen Z. Ren, Lucy Xiaoyang Shi, Laura Smith, Jost Tobias Springenberg, Kyle Stachowicz, James Tanner, Quan Vuong, Homer Walke, Anna Walling, Haohuan Wang, Lili Yu, Ury Zhilinsky | 날짜: 2025-04-22 | URL: https://arxiv.org/abs/2504.16054 📄 PDF
Essence
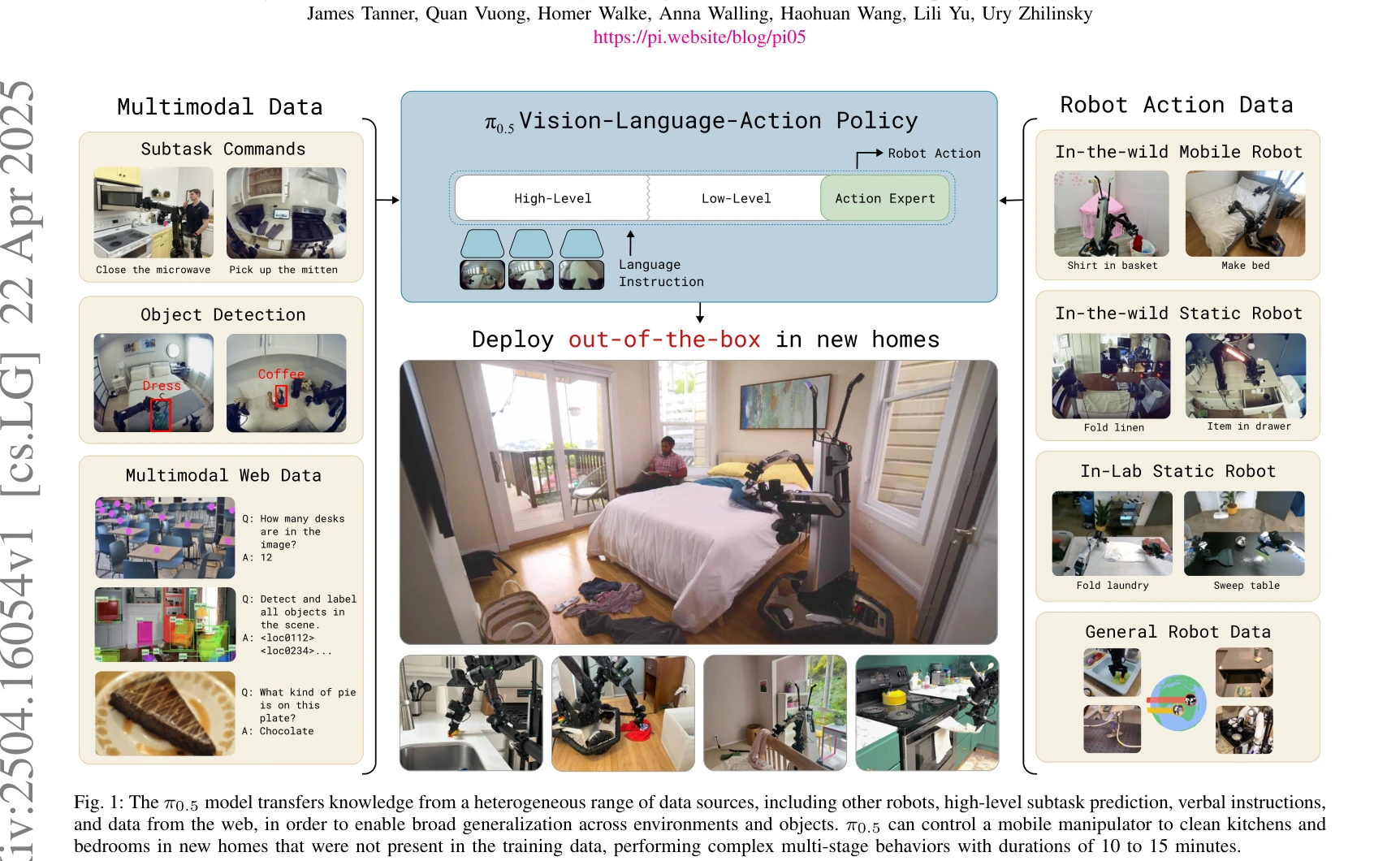
Fig. 1: The π0.5 model transfers knowledge from a heterogeneous range of data sources, including other robots, high-leve
π0.5는 heterogeneous한 다중 데이터 소스(다양한 로봇, 웹 데이터, 의미론적 예측)에서 co-training하여 실제 가정에서 장시간의 복잡한 조작 작업을 수행할 수 있는 Vision-Language-Action 모델이다.
Evaluation
Novelty: 4/5 Technical Soundness: 3/5 Significance: 4/5 Clarity: 4/5 Overall: 4/5
총평: π0.5는 heterogeneous 데이터 소스의 체계적 통합을 통해 VLA 모델의 실제 환경 일반화 문제를 처음으로 실질적으로 해결한 성과이며, 계층적 의미론적 구조와 co-training 프레임워크는 로봇 학습의 중요한 설계 원칙을 제시한다.
