저자: Jacky Kwok, Christopher Agia, Rohan Sinha, Matt Foutter, Shulu Li, Ion Stoica, Azalia Mirhoseini, Marco Pavone | 날짜: 2025-06-21 | URL: https://arxiv.org/abs/2506.17811 📄 PDF
Essence
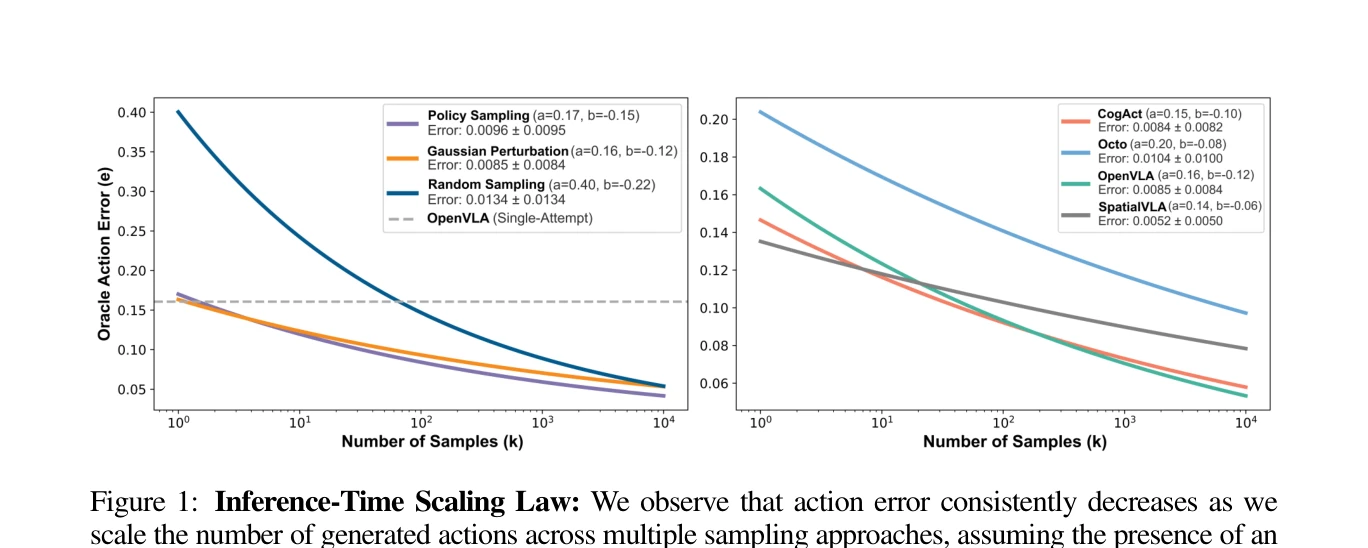
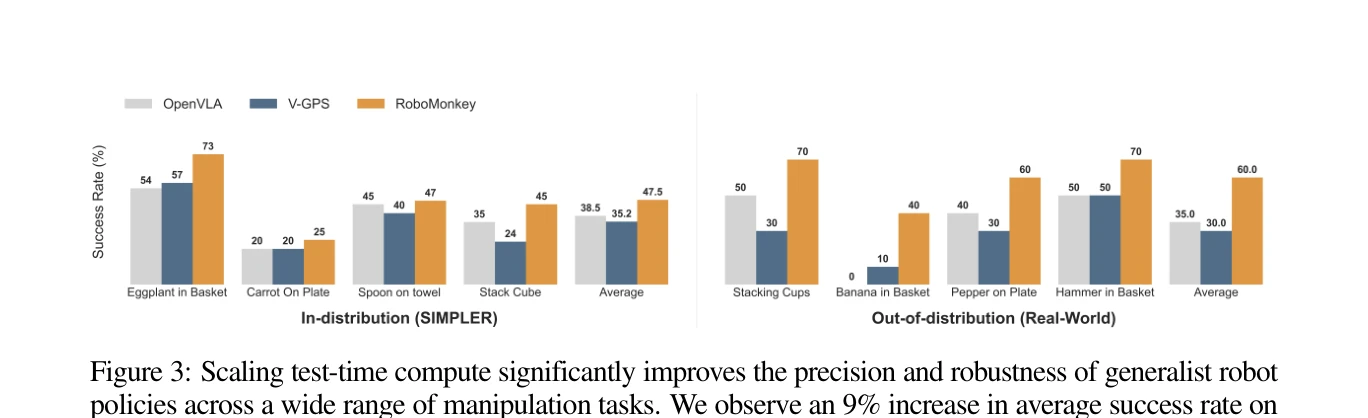
Figure 1: Inference-Time Scaling Law: We observe that action error consistently decreases as we
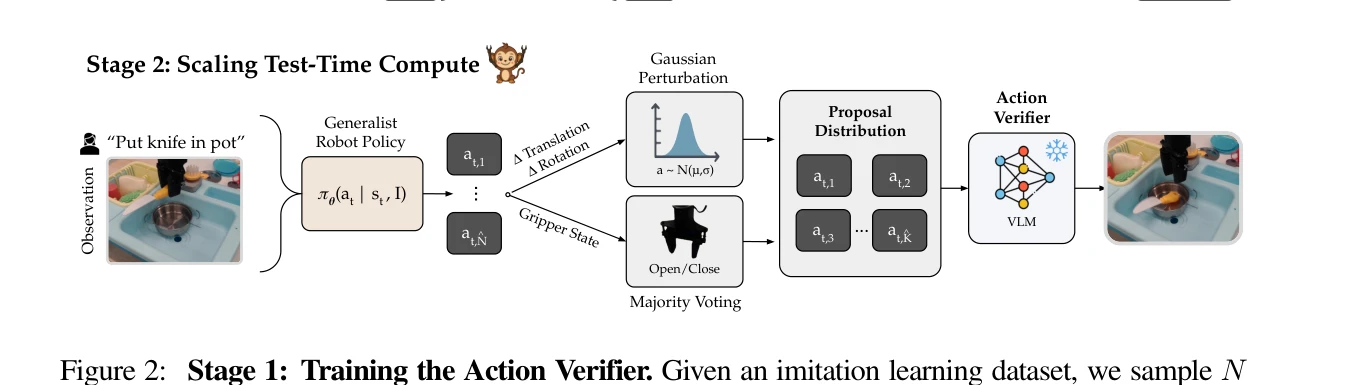
Vision-Language-Action (VLA) 모델의 테스트 시간 성능을 향상시키기 위해 샘플링과 검증을 통한 스케일링 방법을 제시하며, action error가 생성 샘플 수에 따라 지수 거듭제곱 법칙을 따른다는 inference-time scaling law를 발견했다.
Evaluation
Novelty: 4/5 Technical Soundness: 4/5 Significance: 4/5 Clarity: 4/5 Overall: 4/5
총평: VLA 모델의 test-time scaling 가능성을 체계적으로 규명하고 실용적인 RoboMonkey 프레임워크를 제안한 우수한 연구로, inference-time scaling law의 발견과 실제 로봇에서의 유의미한 성능 향상이 로봇 제어 분야에 큰 기여를 한다.