Essence
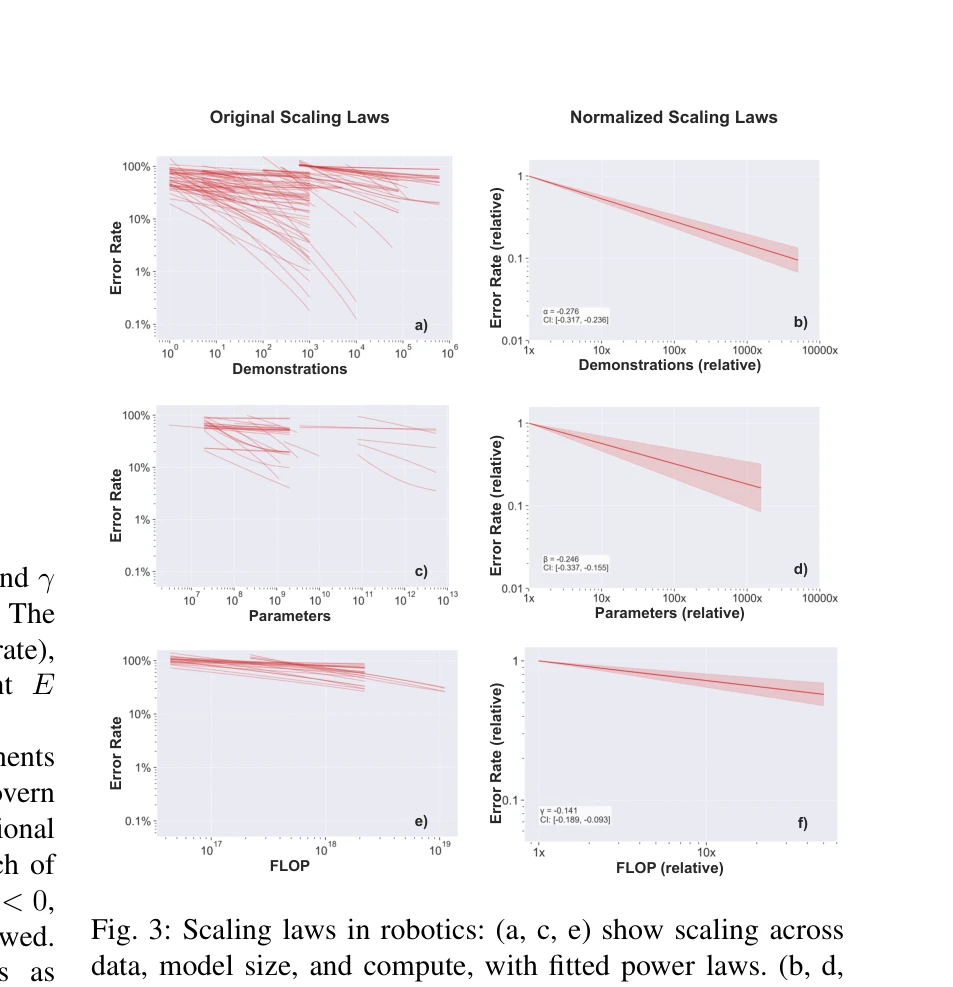
Fig. 3: Scaling laws in robotics: (a, c, e) show scaling across
로봇공학 분야에서 신경망 스케일링 법칙을 처음으로 체계적으로 정량화한 메타분석 연구로, 327개 논문을 분석하여 데이터 크기, 모델 크기, 계산 자원이 로봇 작업 성능에 미치는 영향을 규명했다.
저자: Sebastian Sartor, Neil Thompson | 날짜: 2024-05-22 | URL: https://arxiv.org/abs/2405.14005 📄 PDF
Fig. 3: Scaling laws in robotics: (a, c, e) show scaling across
로봇공학 분야에서 신경망 스케일링 법칙을 처음으로 체계적으로 정량화한 메타분석 연구로, 327개 논문을 분석하여 데이터 크기, 모델 크기, 계산 자원이 로봇 작업 성능에 미치는 영향을 규명했다.
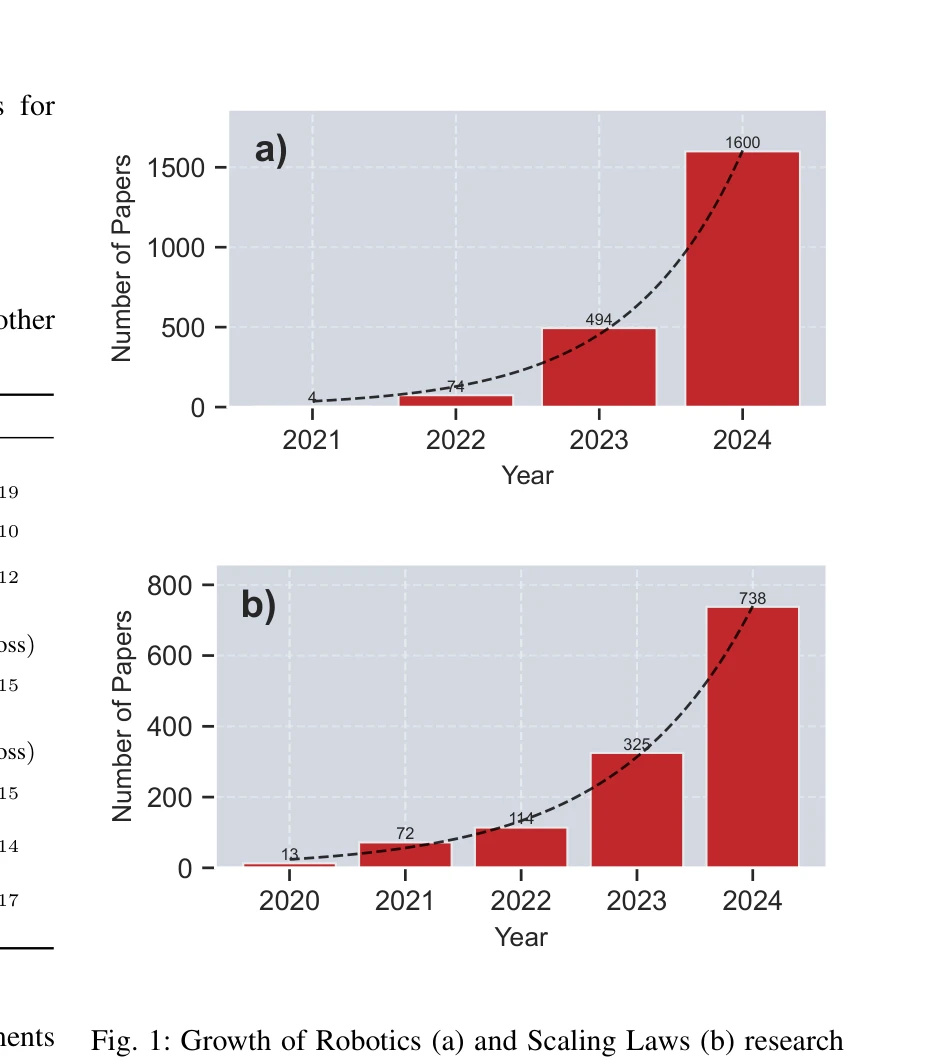
Fig. 1: Growth of Robotics (a) and Scaling Laws (b) research
총평: 로봇공학에서 신경망 스케일링 법칙을 최초로 체계적으로 정량화하여 미래 일반 목적 로봇 시스템 개발의 이론적 기초를 제공하는 중요한 메타분석 연구이다. 다만 현실적인 로봇 데이터 수집 한계와 작업 성공 기준의 다양성으로 인한 메타분석의 한계는 개선이 필요하다.