저자: Kevin Black, Noah Brown, Danny Driess, Adnan Esmail, Michael Equi, Chelsea Finn, Niccolo Fusai, Lachy Groom, Karol Hausman, Brian Ichter, Szymon Jakubczak, Tim Jones, Liyiming Ke, Sergey Levine, Adrian Li-Bell, Mohith Mothukuri, Suraj Nair, Karl Pertsch, Lucy Xiaoyang Shi, James Tanner, Quan Vuong, Anna Walling, Haohuan Wang, Ury Zhilinsky | 날짜: 2024-10-31 | URL: https://arxiv.org/abs/2410.24164 📄 PDF
Essence
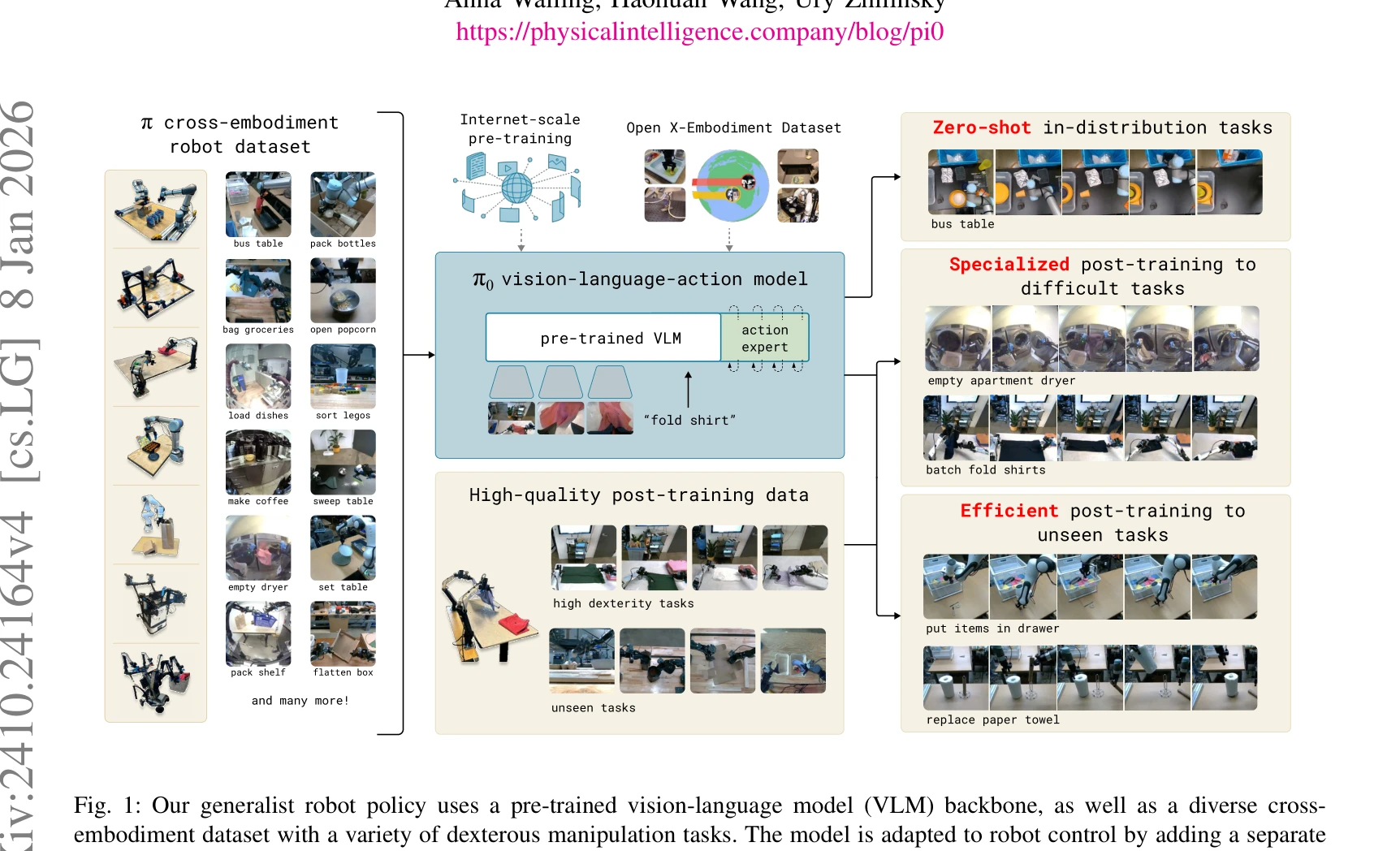
Fig. 1: Our generalist robot policy uses a pre-trained vision-language model (VLM) backbone, as well as a diverse cross-
π0는 사전학습된 vision-language model (VLM)을 기반으로 flow matching을 통해 연속적인 로봇 행동을 생성하는 generalist robot policy를 제안한다. 다양한 로봇 플랫폼에서 10,000시간 이상의 데이터로 사전학습한 후 미세조정을 통해 세탁물 접기, 테이블 청소, 박스 조립 등 복잡한 손작업을 수행할 수 있다.
Evaluation
Novelty: 4/5 Technical Soundness: 4/5 Significance: 4/5 Clarity: 4/5 Overall: 4/5
총평: π0는 flow matching을 VLM 기반 로봇 정책에 처음 적용하고 cross-embodiment 학습으로 다양한 로봇 플랫폼을 통합하여 generalist robot foundation model의 새로운 기준을 제시한다. 10,000시간 이상의 대규모 데이터와 정교한 학습 레시피를 통해 실제 세계에서 복잡한 손작업을 수행 가능함을 보여주며, 로봇 학습의 확장성과 실용성을 크게 향상시키는 중요한 기여이다.

