저자: Zhi Hou, Tianyi Zhang, Yuwen Xiong, Hengjun Pu, Chengyang Zhao, Ronglei Tong, Yu Qiao, Jifeng Dai, Yuntao Chen | 날짜: 2024-10-21 | URL: https://arxiv.org/abs/2410.15959v4 📄 PDF
Essence
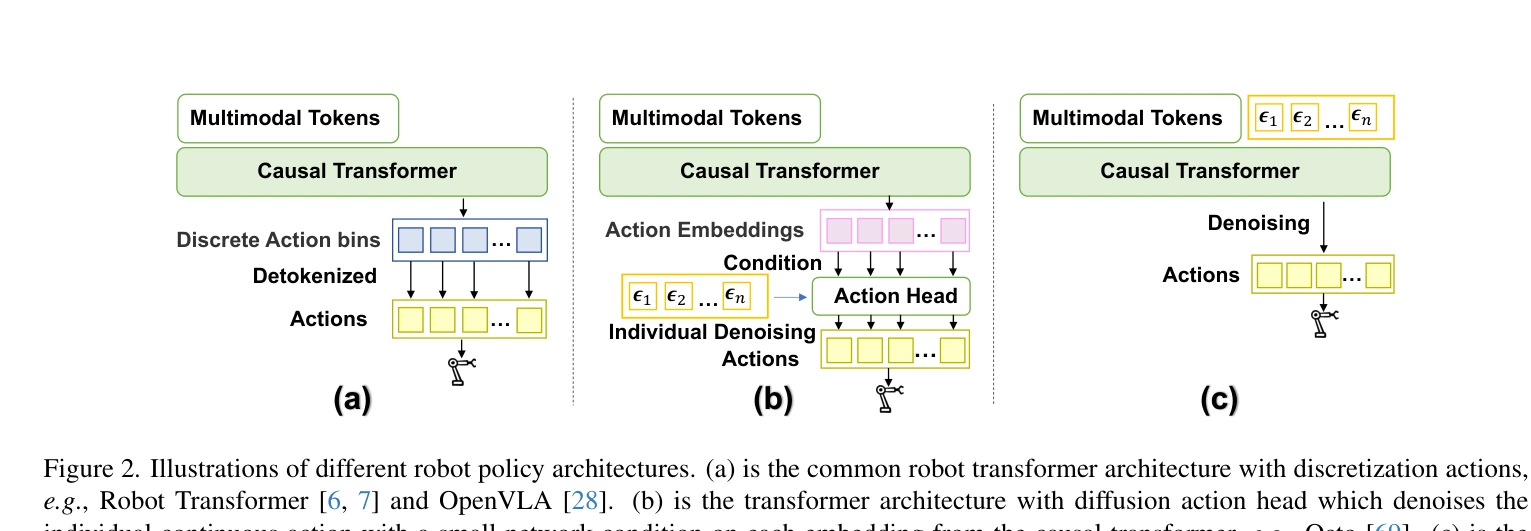
Figure 2. Illustrations of different robot policy architectures. (a) is the common robot transformer architecture with d
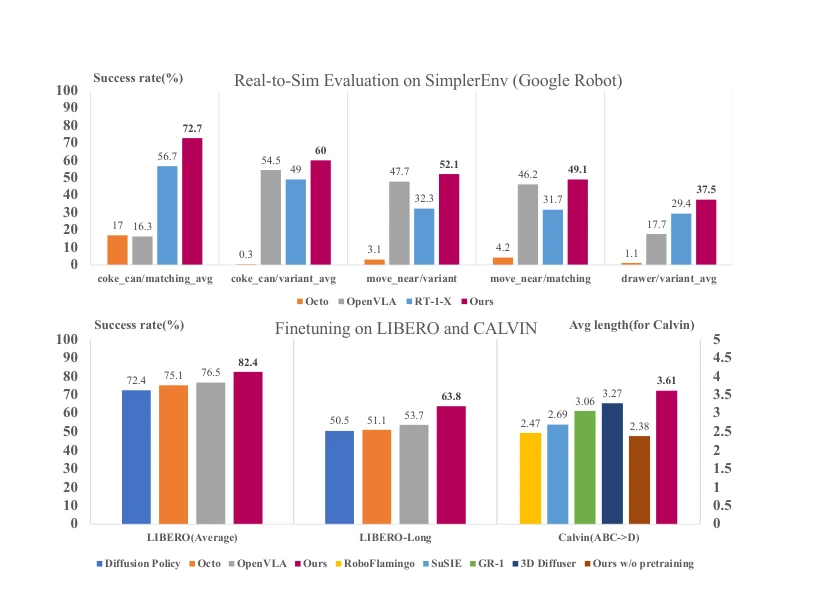
Diffusion Transformer Policy는 큰 멀티모달 diffusion transformer를 사용하여 연속 action sequence를 직접 denoising함으로써, 작은 action head 대신 transformer의 scaling 능력을 활용하는 generalist robot policy이다.
Evaluation
Novelty: 4/5 Technical Soundness: 4/5 Significance: 4/5 Clarity: 4/5 Overall: 4/5
총평: Diffusion Transformer Policy는 transformer 기반 diffusion 아키텍처로 기존 generalist robot policy의 action space 처리 한계를 효과적으로 극복하며, 여러 벤치마크에서 SOTA 성능과 강력한 generalization을 입증한 의미 있는 기여이다.