Essence
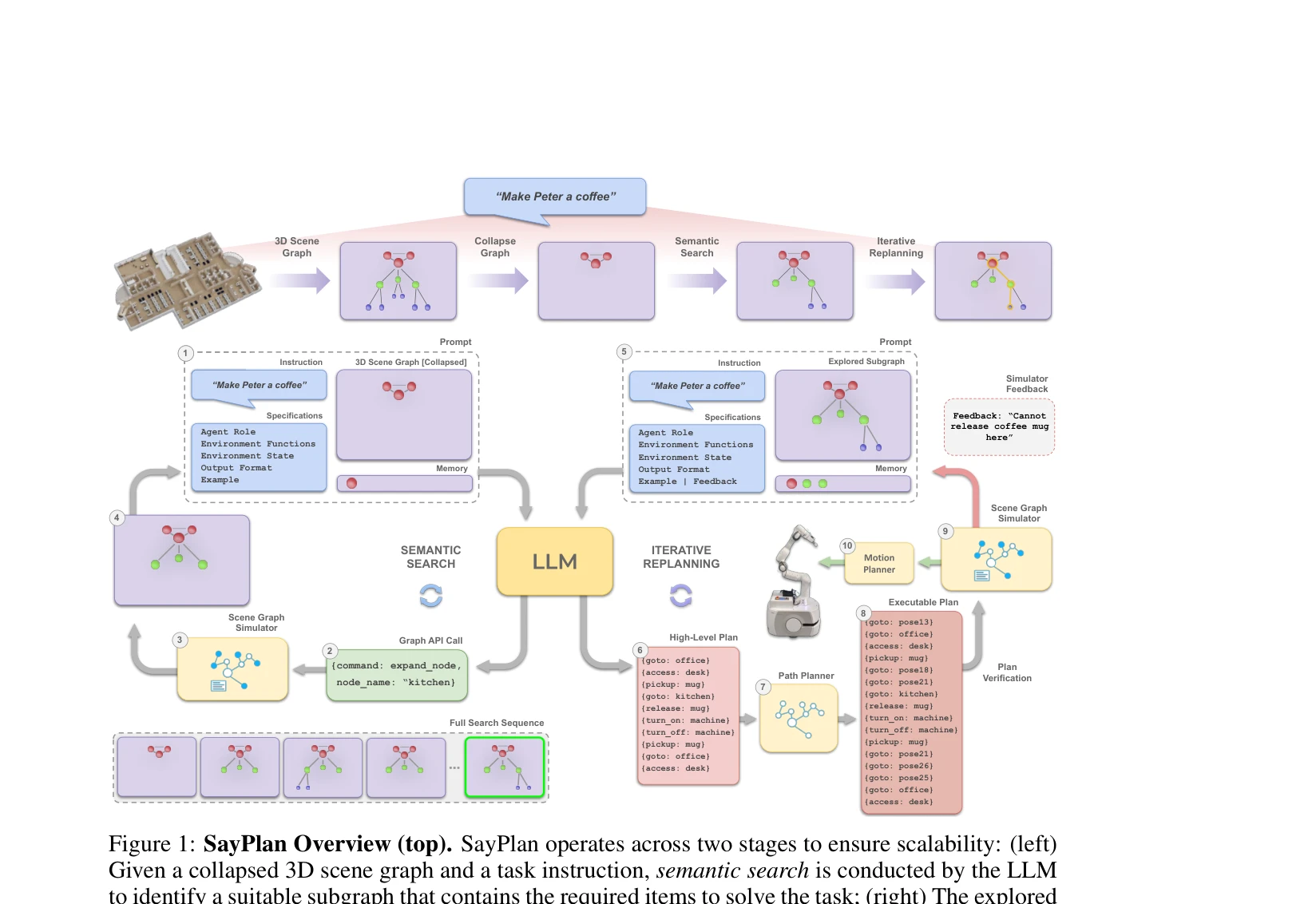
Figure 1: SayPlan Overview (top). SayPlan operates across two stages to ensure scalability: (left)
SayPlan은 3D Scene Graph (3DSG) 표현을 활용하여 LLM 기반 대규모 로봇 태스크 계획을 확장 가능하게 만드는 접근법이다. 의미론적 검색, 고전적 경로 계획 통합, 반복 재계획 파이프라인을 통해 멀티룸, 멀티플로어 환경에서 실행 가능한 계획을 생성한다.
Evaluation
Novelty: 4/5 Technical Soundness: 3/5 Significance: 4/5 Clarity: 4/5 Overall: 4/5
총평: SayPlan은 3DSG의 계층적 구조를 영리하게 활용하여 멀티룸, 멀티플로어 대규모 환경에서 LLM 기반 로봇 계획의 확장성 문제를 실질적으로 해결한 강력한 연구이다. 의미론적 검색, 경로 계획 통합, 반복 재계획 조합으로 실행 가능하고 신뢰성 있는 계획을 보장하여 실제 로보틱스 응용 가능성을 입증한다.