Essence
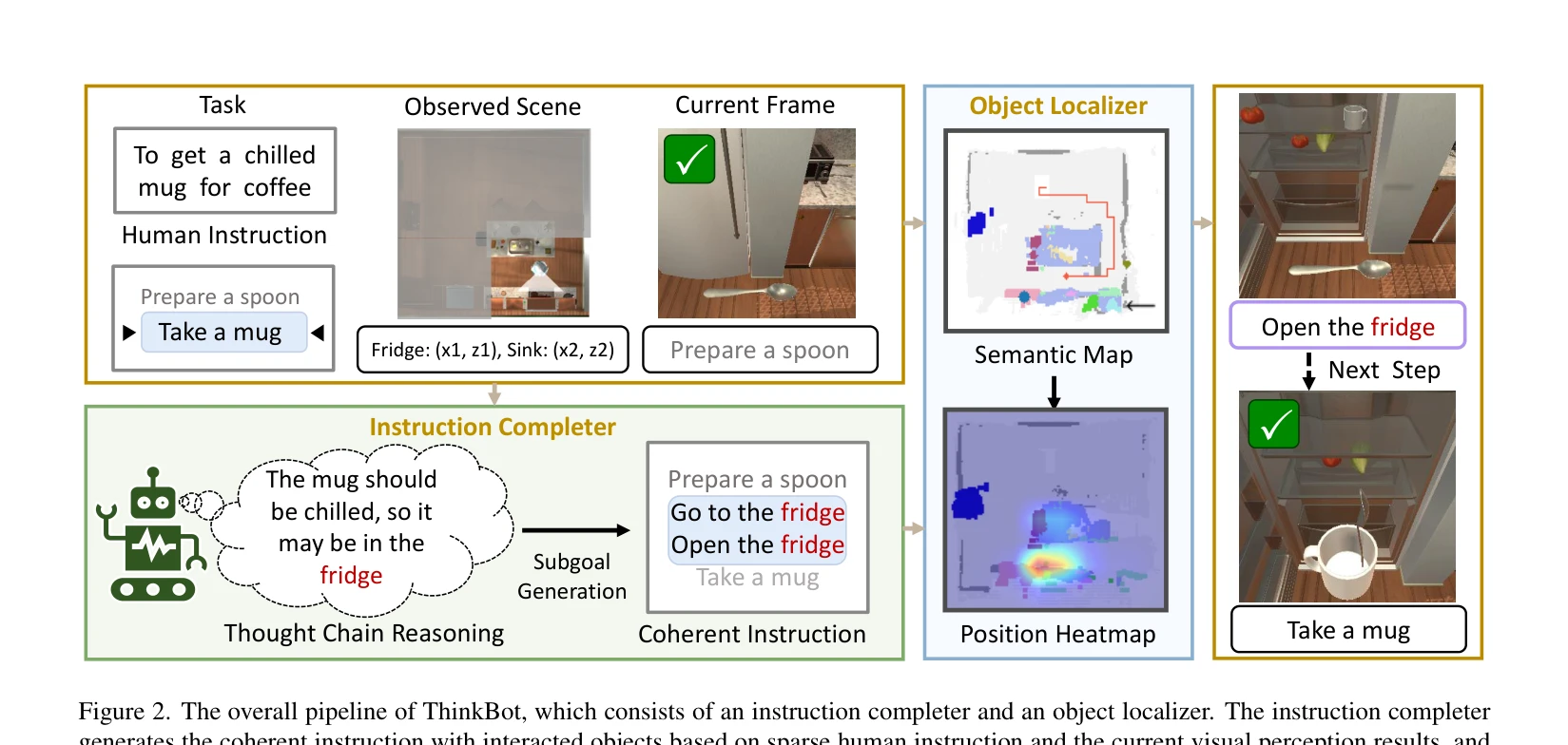
Figure 2. The overall pipeline of ThinkBot, which consists of an instruction completer and an object localizer. The inst
ThinkBot은 희소한 인간 지시문에서 사고 체인 추론을 통해 누락된 행동 설명을 복구하여 embodied instruction following 작업을 수행하는 에이전트를 제안한다. 대규모 언어 모델 기반 instruction completer와 multimodal object localizer로 구성되어 일관된 지시문을 따라 복잡한 목표를 완수할 수 있다.