Essence
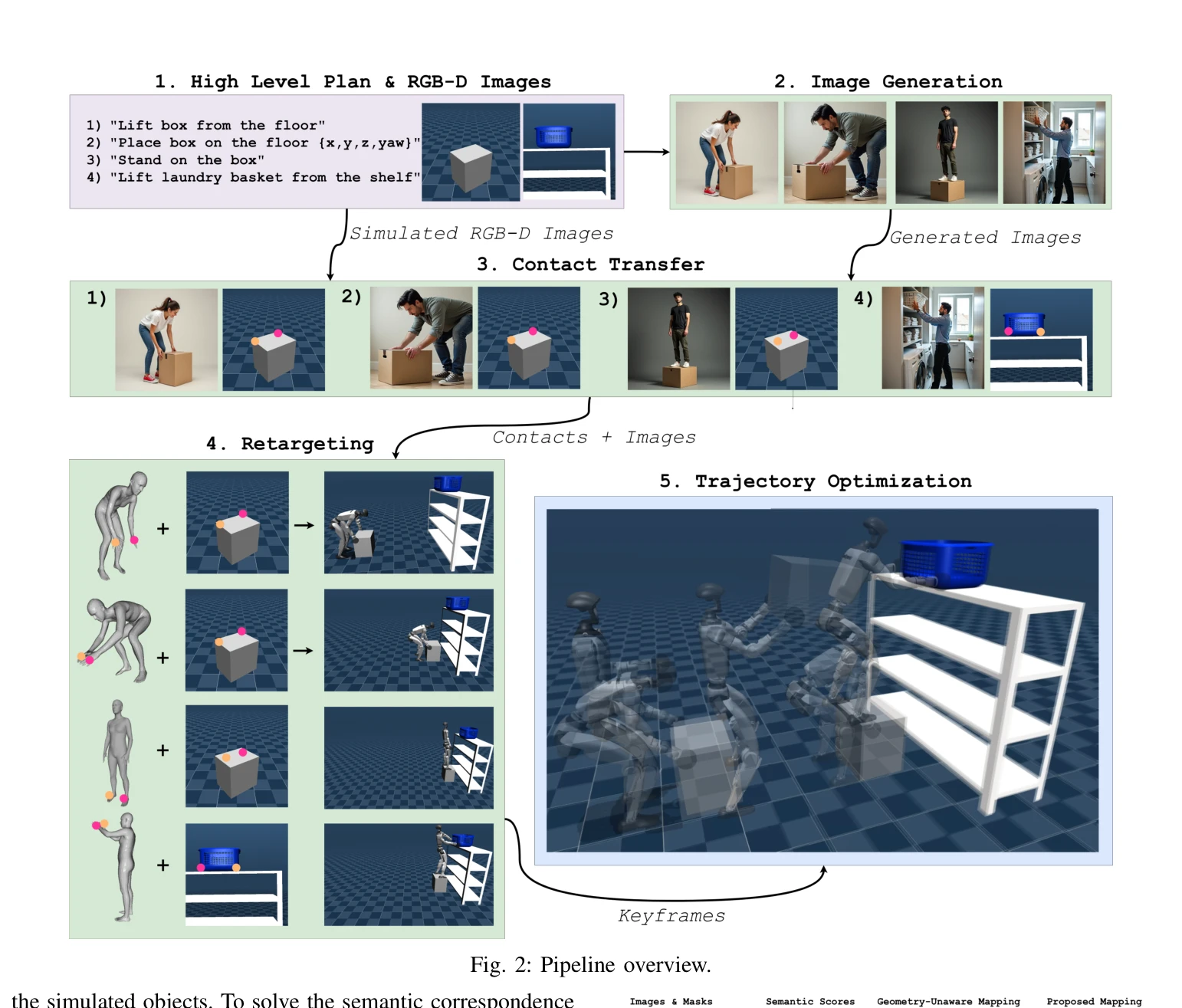
Fig. 2: Pipeline overview.
본 논문은 Latent Diffusion Model(LDM)을 활용하여 인간-물체 상호작용 장면을 생성하고, 이로부터 추출한 접촉 위치와 로봇 구성을 whole-body trajectory optimization에 활용하여 인형로봇의 물리적으로 일관성 있는 장기 조작 계획을 수립한다.
저자: Ilyass Taouil, Haizhou Zhao, Angela Dai, Majid Khadiv | 날짜: 2025-04-23 | URL: https://arxiv.org/abs/2504.16843 📄 PDF
Fig. 2: Pipeline overview.
본 논문은 Latent Diffusion Model(LDM)을 활용하여 인간-물체 상호작용 장면을 생성하고, 이로부터 추출한 접촉 위치와 로봇 구성을 whole-body trajectory optimization에 활용하여 인형로봇의 물리적으로 일관성 있는 장기 조작 계획을 수립한다.
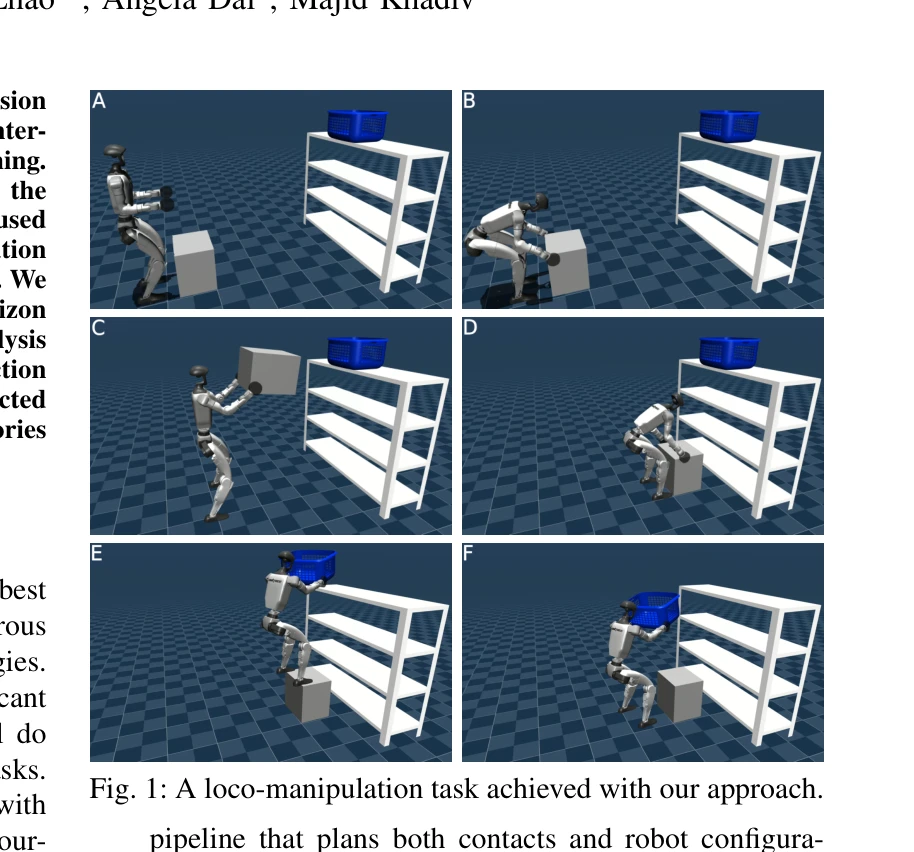
Fig. 1: A loco-manipulation task achieved with our approach.
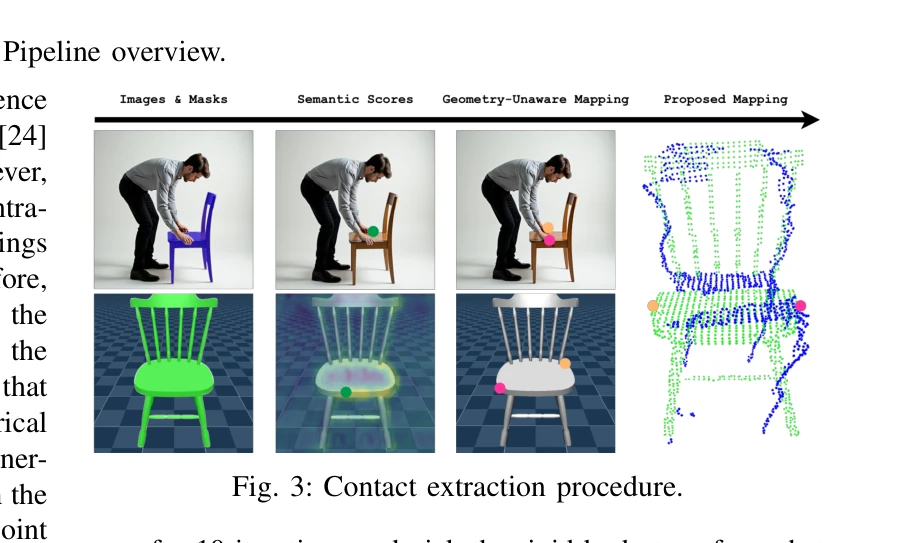
Fig. 3: Contact extraction procedure.
총평: 본 논문은 LDM과 foundation model을 창의적으로 결합하여 인형로봇의 장기 로코-조작 계획 문제를 새로운 방식으로 접근하며, 광범위한 실험과 분석을 통해 방법론의 유효성을 입증했다. 다만 실제 로봇 검증과 일부 모듈의 정확성 개선이 필요하다.