Essence
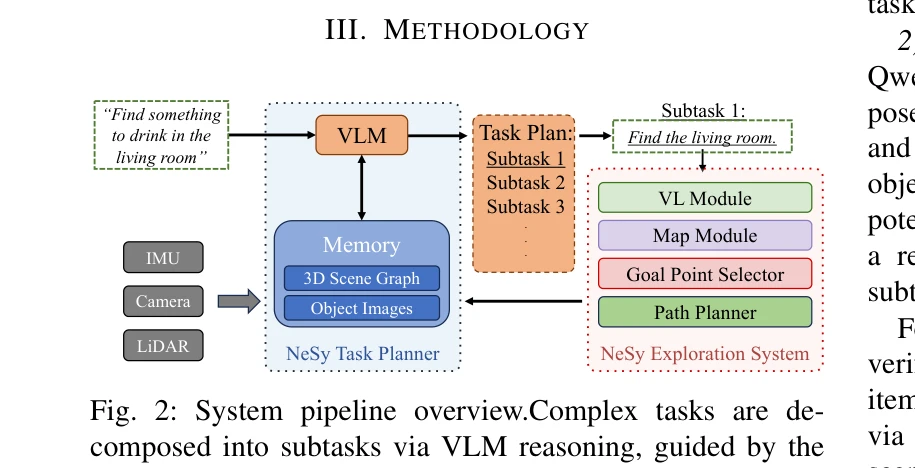
Fig. 2: System pipeline overview.Complex tasks are de-
VL-Nav는 신경-기호 접근법(NeSy)을 통해 복잡한 인간 지시에 따라 미지의 대규모 환경을 탐색하는 로봇 네비게이션 시스템으로, VLM의 추론 능력과 기호적 안내를 결합한다.
저자: Yi Du, Taimeng Fu, Zhipeng Zhao, Shaoshu Su, Zitong Zhan, Qiwei Du, Zhuoqun Chen, Bowen Li, Chen Wang | 날짜: 2025-02-02 | URL: https://arxiv.org/abs/2502.00931 📄 PDF
Fig. 2: System pipeline overview.Complex tasks are de-
VL-Nav는 신경-기호 접근법(NeSy)을 통해 복잡한 인간 지시에 따라 미지의 대규모 환경을 탐색하는 로봇 네비게이션 시스템으로, VLM의 추론 능력과 기호적 안내를 결합한다.
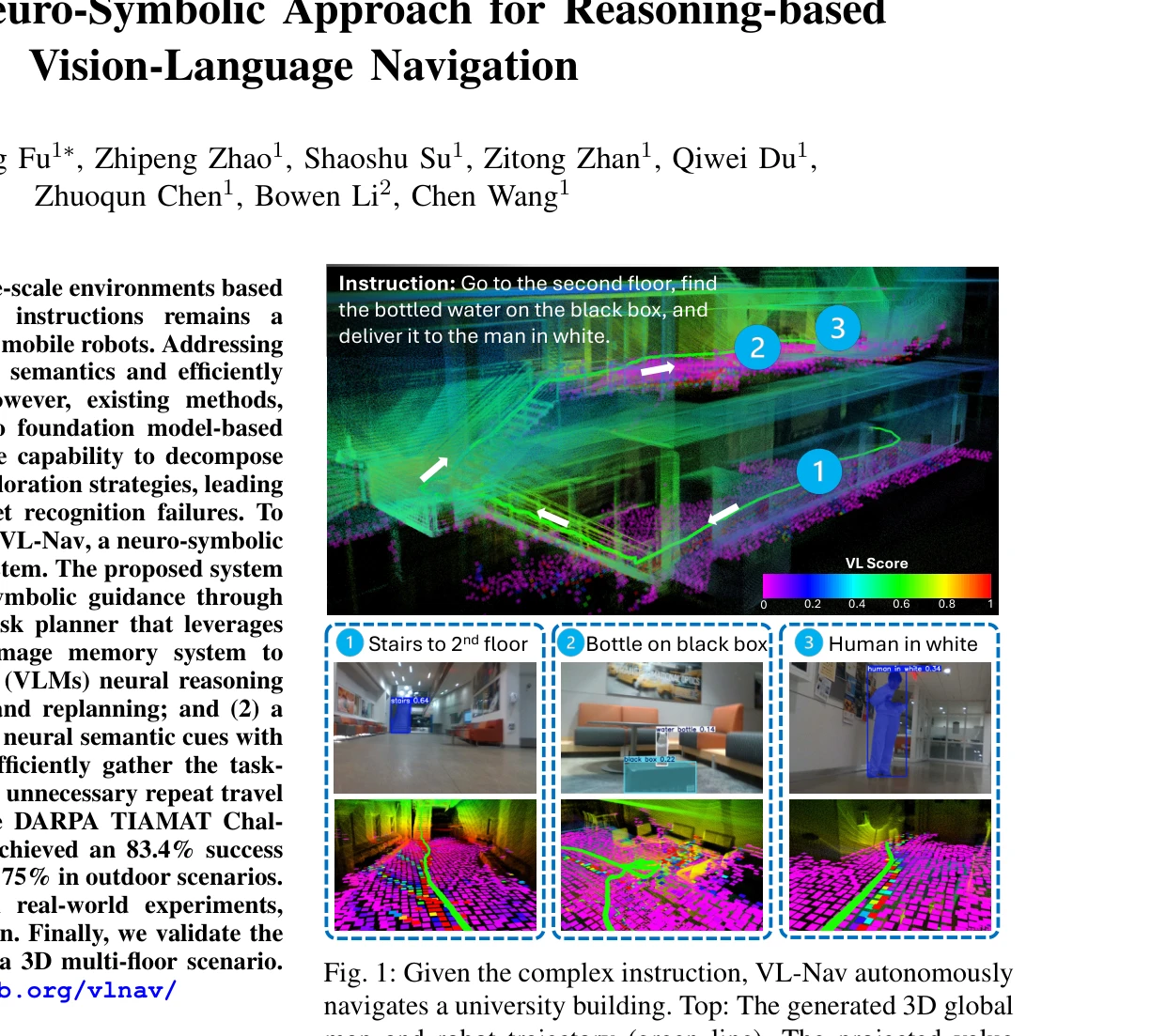
Fig. 1: Given the complex instruction, VL-Nav autonomously
Fig. 2: System pipeline overview.Complex tasks are de-
총평: VL-Nav는 신경-기호 통합을 통해 복잡한 추상적 지시 기반 로봇 네비게이션의 중요한 문제를 해결하며, DARPA TIAMAT에서의 우수한 성과와 실제 로봇 배포를 통해 실용성을 입증한 의미 있는 연구이다.